
माको रोबोटिक-आर्म असिस्टेड टोटल नी आर्थ्रोप्लास्टी
Main Text
Table of Contents
टोटल नी आर्थ्रोप्लास्टी (टीकेए) दशकों से है और उन्नत अपक्षयी संयुक्त रोग वाले घुटने में दर्द को कम करने और कार्य को बहाल करने के लिए एक बहुत ही सफल प्रक्रिया के रूप में कार्य करता है। इन वर्षों में, शल्य चिकित्सा तकनीक में कई प्रगति हुई है और इम्प्लांट डिजाइन में और भी अधिक। टीकेए में हाल ही में तकनीकी सफलताओं में से एक गतिशील संयुक्त संतुलन और हड्डी की तैयारी के साथ प्रीऑपरेटिव प्लानिंग और इंट्राऑपरेटिव मार्गदर्शन को बढ़ाने के लिए रोबोटिक-असिस्टेड आर्म का उपयोग है। यह वीडियो लेख माको रोबोटिक सहायता का उपयोग करके एक वरस विकृति अपक्षयी घुटने में एक पश्चवर्ती स्थिर करने वाले टीकेए के प्रदर्शन में प्राथमिक लेखक द्वारा उपयोग की जाने वाली ऑपरेटिव तकनीक को रेखांकित करता है।
घुटने के पुराने ऑस्टियोआर्थराइटिस एक अपक्षयी बीमारी है जो आर्टिकुलर कार्टिलेज के प्रगतिशील नुकसान का कारण बनती है। रोगसूचक घुटने के पुराने ऑस्टियोआर्थराइटिस की घटना प्रति वर्ष प्रति 100,000 में लगभग 240 है। जोखिम कारकों में आर्टिकुलर आघात, दोहराए जाने वाले घुटने के झुकने की आवश्यकता वाला व्यवसाय, मांसपेशियों की कमजोरी, बड़े शरीर द्रव्यमान, महिला लिंग, बढ़ी हुई उम्र, आनुवंशिकी, जाति (सफेद > हिस्पैनिक > अफ्रीकी अमेरिकी), और चयापचय सिंड्रोम (केंद्रीय या पेट के मोटापे, डिस्लिपिडेमिया, उच्च रक्तचाप और ऊंचा उपवास ग्लूकोज के स्तर से युक्त एक सिंड्रोम) शामिल हैं। आर्टिकुलर कार्टिलेज में पैथोफिजियोलॉजिकल परिवर्तनों में पानी की मात्रा में वृद्धि शामिल है, कोलेजन अव्यवस्थित हो जाता है, प्रोटिओग्लाइकेन्स बदल जाते हैं और अंततः मात्रा में कम हो जाते हैं, लेकिन चोंड्रोसाइट्स आकार और संख्या समान रहती है। सबकॉन्ड्रल हड्डी फिर से तैयार करने का प्रयास करती है, आसपास के स्केलेरोसिस के साथ लिटिक अल्सर बनाती है। बोनी ओस्टियोफाइट्स भी एंडोकॉन्ड्रल ओसिफिकेशन के पैथोलॉजिकल सक्रियण के माध्यम से बनते हैं। सिनोवियम प्रगतिशील भड़काऊ परिवर्तनों से गुजरता है, अंततः हाइपरवैस्कुलर और तेजी से मोटा हो जाता है।
रोगी एक 66 वर्षीय महिला है जो चोट या आघात के इतिहास के बिना बाएं घुटने के दर्द के 2 साल के इतिहास के साथ प्रस्तुत करती है। दर्द लंबे समय तक अनुकरण, सीढ़ियों पर चढ़ने और लंबे समय तक खड़े रहने से बढ़ जाता है। आजमाए गए उपचारों में ब्रेसिंग, विरोधी भड़काऊ मौखिक दवाएं, अच्छी अस्थायी राहत के साथ कॉर्टिकोस्टेरॉइड इंजेक्शन और औपचारिक भौतिक चिकित्सा शामिल हैं। उसके पास उच्च रक्तचाप, हाइपरलिपिडिमिया और चिंता का पिछला चिकित्सा इतिहास है।
रोगी आरामदायक, अच्छी तरह से दिखाई देने वाला और समय, स्थान और व्यक्ति के लिए उन्मुख था। वह एक एंटाल्जिक चाल के साथ घुलमिल गई। उसके बाएं निचले छोर की जांच से पता चला कि त्वचा साफ और बरकरार थी। जांघ और पैर के डिब्बे नरम थे। उसे दर्द के बिना गति की एक सामान्य कूल्हे की सीमा थी। मोटे तौर पर, उसके घुटने हल्के वरस विकृति में थे। एक मध्यम घुटने का बहाव था। उसके घुटने की गति 0 ° से 115 ° तक फ्लेक्सन थी। उसे औसत दर्जे की संयुक्त रेखा पर कोमलता थी। उसके घुटने की लिगामेंट परीक्षा पूर्ववर्ती दराज, लाचमैन, पश्चवर्ती दराज, और वरस और वाल्गस तनाव परीक्षण के लिए स्थिर थी। उसका एक्सटेंसर तंत्र बरकरार था, और उसे सीधे पैर उठाने के साथ कोई दर्द नहीं था। वह न्यूरोवास्कुलर रूप से दूर से बरकरार थी।
कुल घुटने के आर्थ्रोप्लास्टी (टीकेए) के साथ आगे बढ़ने का निर्णय लेने से पहले महत्वपूर्ण रेडियोग्राफी में वजन-असर एपी, पीए फ्लेक्सन, पार्श्व और सूर्योदय दृश्य शामिल हैं। कुछ सर्जन लंबे पैर संरेखण रेडियोग्राफ की समीक्षा करना भी पसंद करते हैं। इस रोगी के लिए छवियों ने हड्डी-पर-हड्डी संपर्क, सबकॉन्ड्रल स्केलेरोसिस और मल्टीपल पेरिआर्टिकुलर ओस्टियोफाइट्स के साथ मेडियल और पेटेलोफेमोरल डिब्बे में संयुक्त स्थान के नुकसान के साथ गंभीर अपक्षयी परिवर्तनों का खुलासा किया। हल्के वरस यांत्रिक संरेखण था। पटेला सूर्योदय के दृश्य पर केंद्रीय रूप से ट्रैक कर रहा था।
इसके अतिरिक्त, प्रीऑपरेटिव प्लानिंग करने और माको रोबोट को सटीक इंट्राऑपरेटिव मार्गदर्शन करने की अनुमति देने के लिए माको प्रोटोकॉल के अनुसार एक सीटी स्कैन प्राप्त किया गया था। सीटी प्रोटोकॉल माको द्वारा प्रदान किया जाता है।
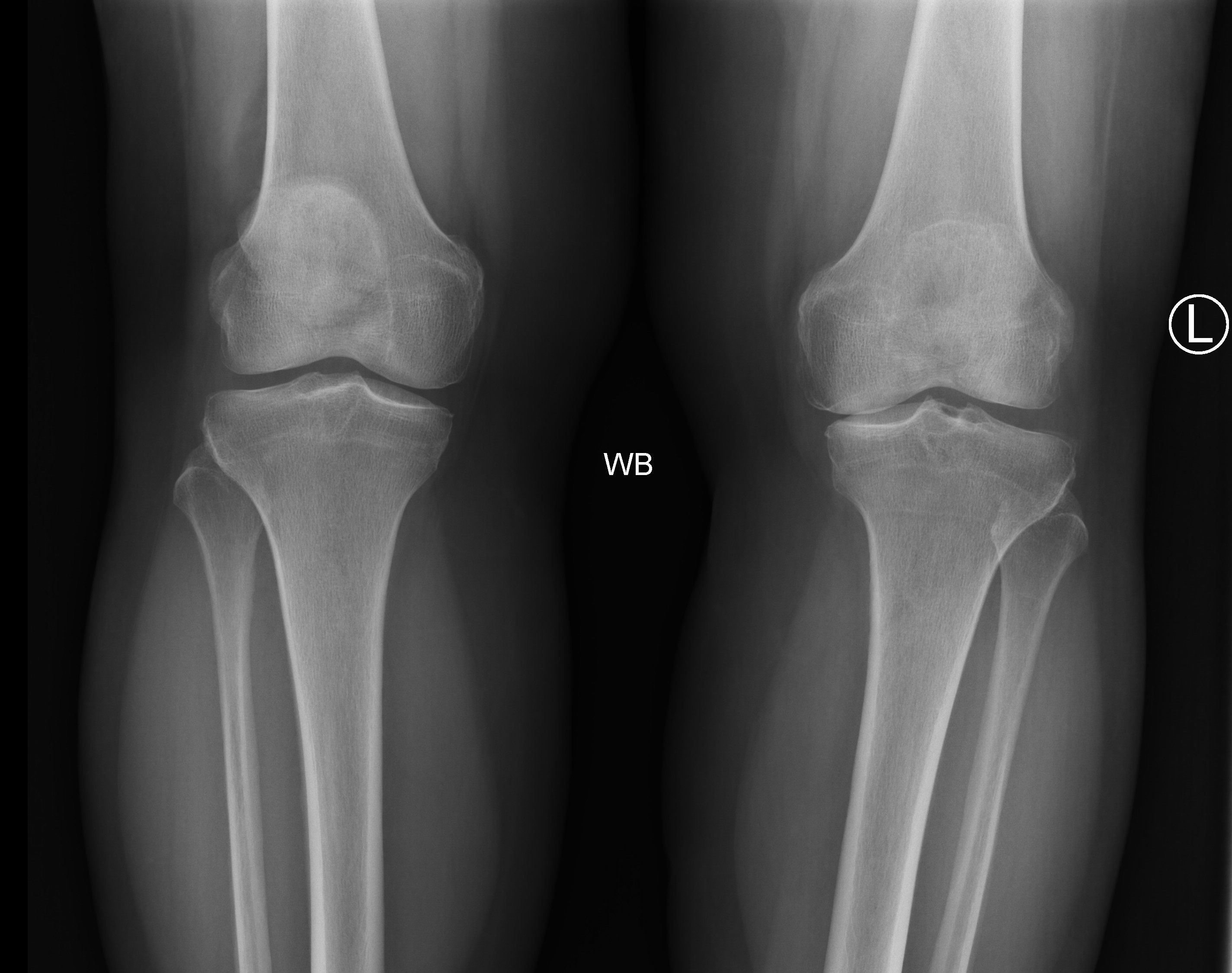
चित्र 1a. प्रीऑपरेटिव एपी रेडियोग्राफी रोगी के बाएं घुटने में वरस विकृति दिखाती है।
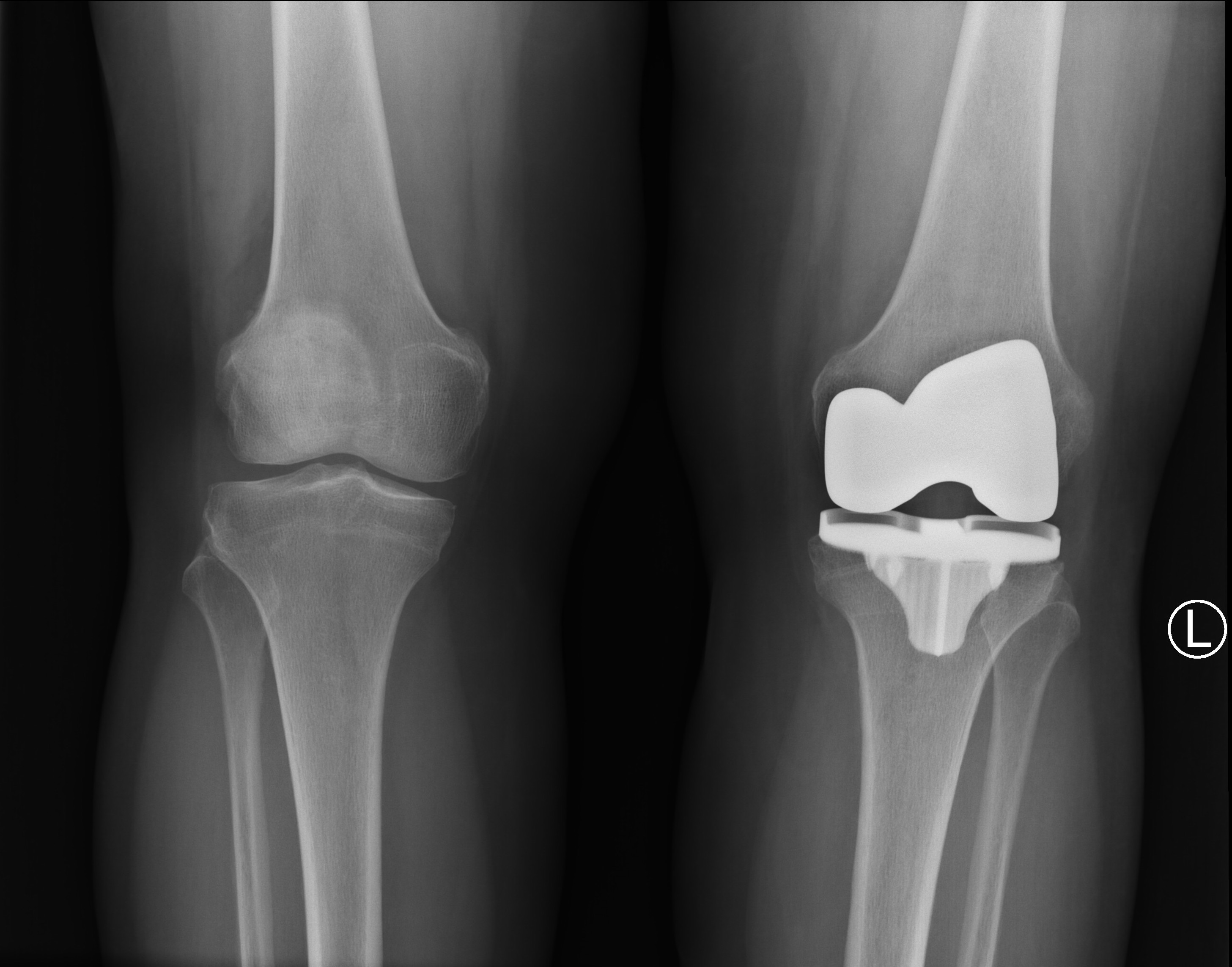
चित्र 2a. पोस्टऑपरेटिव एपी रेडियोग्राफ उचित शारीरिक अक्ष की बहाली दिखा रहा है।
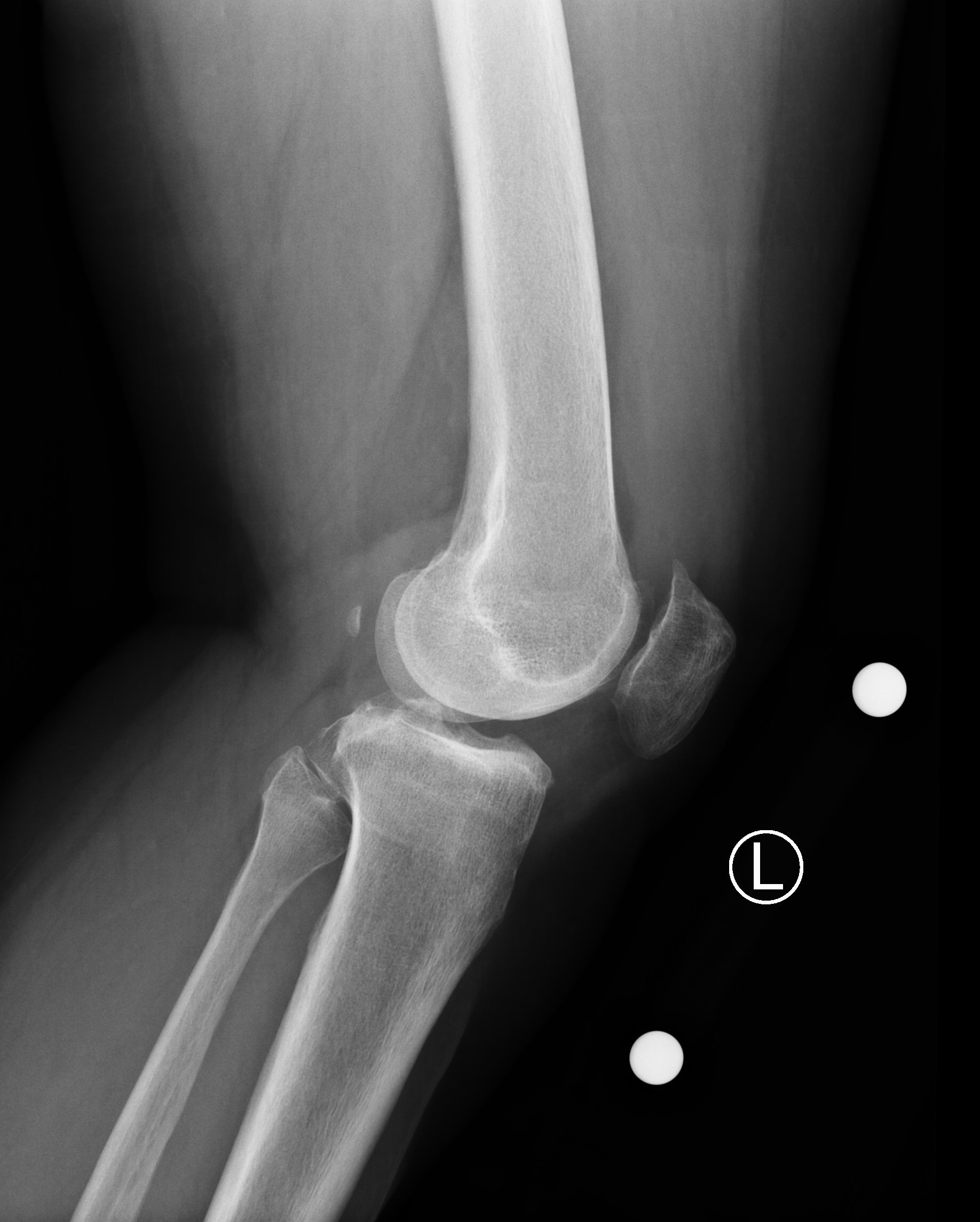
चित्र 1b. प्रीऑपरेटिव लेटरल रेडियोग्राफी रोगी के बाएं घुटने में वरस विकृति दिखाती है।
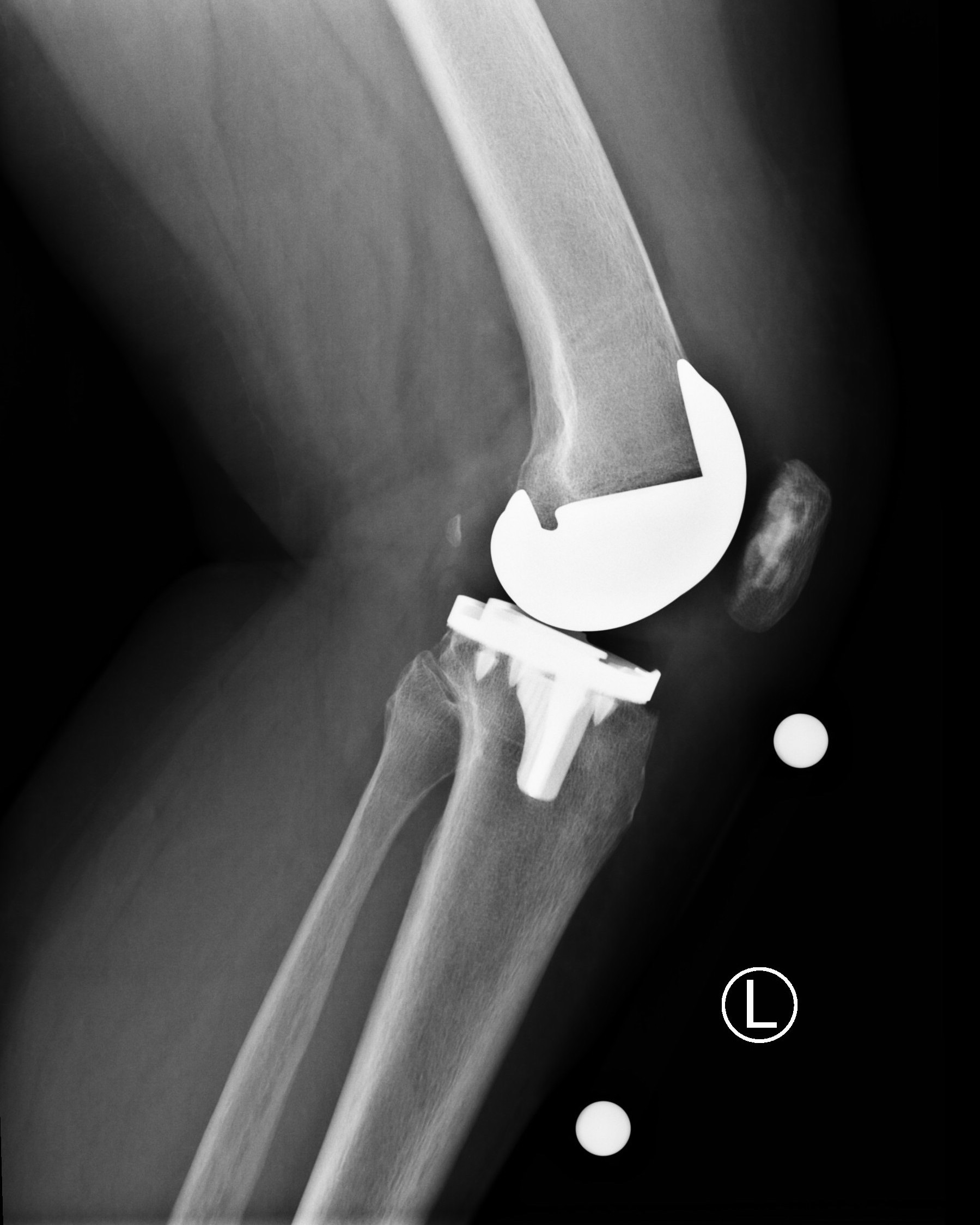
चित्र 2b. पोस्टऑपरेटिव पार्श्व रेडियोग्राफ ऊरु और टिबियल घटकों के उचित संरेखण और आकार को दर्शाता है।
पुराने ऑस्टियोआर्थराइटिस का प्राकृतिक इतिहास प्रगतिशील है, जिससे दर्द और विकलांगता बढ़ रही है। हालांकि, रोगसूचक प्रगति की दर रोगी से रोगी में परिवर्तनशील है। सामान्य तौर पर, यह एक धीमी प्रगति है जहां लक्षण महीनों से वर्षों तक अधिक गंभीर, लगातार और दुर्बल हो जाते हैं। चूंकि गठिया और विकृति समय के साथ खराब हो जाती है, इसलिए रोगियों को गति की सीमा और परिक्रमा करने की क्षमता सहित उनके कार्य में गिरावट का अनुभव होता है। कुछ रोगियों में रेडियोग्राफ़ पर केवल हल्के रोग के साथ गंभीर लक्षण होते हैं, जबकि अन्य में गंभीर रेडियोग्राफिक रोग के साथ कोई लक्षण नहीं होते हैं। सर्जनों को रोगी और उसके लक्षणों का इलाज करना चाहिए।
ऑस्टियोआर्थ्रिटिक घुटनों के लिए उपचार आमतौर पर गैर-ऑपरेटिव प्रबंधन के साथ शुरू होता है जिसमें गतिविधि संशोधन शामिल होता है जैसे कि प्रभाव लोडिंग अभ्यास को कम करना और वजन कम करना। नॉनस्टेरॉइडल एंटी-इंफ्लेमेटरी ड्रग्स (एनएसएआईडी) भी पहली पंक्ति के उपचार हैं। अन्य गैर-ऑपरेटिव उपचार विकल्पों में एसिटामिनोफेन, भौतिक चिकित्सा, कॉर्टिकोस्टेरॉइड इंजेक्शन, ब्रेसिंग और एक सहायक उपकरण जैसे बेंत या बैसाखी का उपयोग शामिल है। एक सर्जिकल विकल्प जो आमतौर पर पृथक मेडियल या लेटरल कम्पार्टमेंट गठिया वाले युवा रोगियों के लिए आरक्षित होता है, प्रभावित डिब्बे को ऑफ-लोड करने और विकृति को सही करने के लिए एक ऑस्टियोटॉमी है। संयुक्त प्रतिस्थापन विकल्पों में आंशिक घुटने का प्रतिस्थापन और कुल घुटने का प्रतिस्थापन शामिल है। आर्थ्रोप्लास्टी के जोखिम और लाभ व्यक्तिगत आधार पर तौले जाते हैं। जोखिम ों में शामिल हैं, लेकिन संक्रमण, रक्तस्राव, रक्त के थक्के, आसपास की संरचनाओं को नुकसान, घाव भरने के मुद्दे, पैर की लंबाई विसंगति, अस्थिरता, निरंतर दर्द, कठोरता, फ्रैक्चर और आगे की सर्जरी की आवश्यकता शामिल हैं।
टीकेए एक सफल शल्य चिकित्सा प्रक्रिया है जो मज़बूती से अपक्षयी संयुक्त रोग वाले रोगियों में दर्द से राहत और बेहतर कार्य प्रदान करती है। रोगी को बाएं घुटने के अपक्षयी परिवर्तनों के साथ प्रस्तुत किया गया। उसे मध्यम से गंभीर गठिया की गतिविधि और रेडियोग्राफिक निष्कर्षों से जुड़ा गंभीर दर्द था। वह चलने वाले एड्स, ब्रेसिंग, भौतिक चिकित्सा, इंजेक्शन और एनाल्जेसिक दवाओं के साथ पर्याप्त कार्य या दर्द से राहत प्राप्त करने में विफल रही थी। इन निष्कर्षों के आधार पर और रोगी के साथ एक साझा निर्णय चर्चा के बाद जिसमें प्रक्रिया के जोखिमों को रेखांकित करना शामिल था, घुटने की प्रतिस्थापन सर्जरी के साथ आगे बढ़ने का निर्णय लिया गया था।
माको रोबोट-सहायता प्राप्त टीकेए के लिए रोगी का चयन काफी हद तक सर्जन के निर्णय पर निर्भर करता है। विचार करने वाली चीजों में हड्डी पंजीकरण को पूरा करने के लिए निचले कूल्हे की पर्याप्त अभिव्यक्ति और गति की सीमा शामिल है; ऑपरेटिव पैर में धातु की उपस्थिति, संभवतः सीटी स्कैन में कलाकृतियों का निर्माण करना जो सटीकता को कम कर सकता है और ऑपरेटिव योजना पर प्रतिकूल प्रभाव डाल सकता है; और माको का उपयोग करने के साथ सर्जन का आराम स्तर। इस समय, केवल कुछ प्रत्यारोपण माको रोबोट के साथ संगत हैं, इसलिए अतिरिक्त कारकों पर सावधानीपूर्वक विचार करने की आवश्यकता है। उनमें प्रत्यारोपण की स्थिरता को प्रभावित करने वाली खराब हड्डी की गुणवत्ता शामिल है; खराब नरम ऊतक अखंडता संगत प्रत्यारोपण के साथ एक स्थिर जोड़ की बहाली को रोकती है; और घुटने में समग्र विकृति का प्रकार और महत्व, जिसमें फ्लेक्सन कॉन्ट्रैक्टर्स और फिक्स्ड वरस / वाल्गस संरेखण शामिल हैं।
ऑस्टियोआर्थराइटिस सबसे आम संयुक्त रोग है। 60 वर्ष से अधिक आयु के अनुमानित 37.4% वयस्कों में गठिया के रेडियोग्राफिक सबूत हैं। अमेरिकी जनगणना ब्यूरो के अनुसार, कुल घुटने के प्रतिस्थापन की अनुमानित संख्या में 2030 तक 3.5 मिलियन सर्जरी की वृद्धि होने का अनुमान है। 2
टीकेए, सामान्य तौर पर, पिछले कुछ दशकों में उत्कृष्ट नैदानिक परिणाम उत्पन्न किए हैं। 3, 4 फिर भी, सुधार के लिए जगह है। अध्ययनों से पता चलता है कि पारंपरिक टीकेए के 31.8% बनाम कंप्यूटर-सहायता प्राप्त टीकेए के 9% में 3 डिग्री से अधिक की यांत्रिक अक्ष विकृति है। अच्छे नैदानिक परिणामों को निर्धारित करने वाले सबसे बड़े कारकों में से एक उचित घटक प्लेसमेंट है। 6, 7 एक कैडवेरिक अध्ययन में, पारंपरिक टीकेए नियंत्रणों की तुलना में माको टीकेए के साथ औसत अंतिम हड्डी की कटौती और घटक की स्थिति 5 और 3.1 गुना अधिक सटीक थी। 8 इसलिए, रोबोटिक-असिस्टेड टोटल नी आर्थ्रोप्लास्टी (आरएटीकेए) हड्डी में कटौती और घटक प्लेसमेंट की सटीकता में वृद्धि कर सकता है।
एक अन्य कैडवेरिक अध्ययन में, आरएटीकेए के लिए माको तकनीक ने अच्छी नरम ऊतक सुरक्षा का प्रदर्शन किया, जिसमें एलसीएल, एमसीएल, पीसीएल, या पेटेला कण्डरा को कोई चोट नहीं लगी। इस अध्ययन से यह भी पता चला है कि हड्डी में कटौती करते समय उचित विज़ुअलाइज़ेशन के लिए टिबियल सबलक्सेशन और पेटेलर एवर्सन की आवश्यकता नहीं थी। 9
यद्यपि अन्य रोबोट सहायता प्राप्त प्रणालियां मौजूद हैं, स्ट्राइकर माको प्रणाली का उपयोग स्ट्राइकर ट्रायथलॉन प्रत्यारोपण के साथ इस मामले की प्रस्तुति में किया गया था। ट्रायथलॉन कुल घुटने के प्रत्यारोपण ने दस साल के अनुवर्ती अध्ययन में 99% की उत्कृष्ट उत्तरजीविता का प्रदर्शन किया है। 2 मिलियन से अधिक ट्रायथलॉन घुटनों को प्रत्यारोपित किया गया है, यह दर्शाता है कि यह एक विश्वसनीय प्रणाली है जो अब माको रोबोटिक-सहायता प्राप्त तकनीक के साथ पूरी तरह से संगत है। 10
गठिया घुटनों में बीमारी का व्यापक स्पेक्ट्रम और हर रोगी की अनूठी शारीरिक रचना टीकेए करने में सर्जन के लिए चुनौतियां पेश कर सकती है। आरएटीकेए तकनीक सर्जन को प्रीऑपरेटिव 3 डी सीटी-आधारित टेमप्लेटिंग के आधार पर लाइव फीडबैक लूप का उपयोग करके इंट्राऑपरेटिव निर्णय लेने की अनुमति देती है जो हड्डी के कट और इम्प्लांट प्लेसमेंट में छोटे समायोजन की अनुमति देती है। रोबोटिक आर्म तकनीक, जिसमें वास्तविक समय की प्रतिक्रिया शामिल है, सर्जन को हड्डी में कटौती करने से पहले नरम ऊतक तनाव के आधार पर जोड़ को संतुलित करने की अनुमति देती है। एक एकल-सर्जन अध्ययन में, मार्चेंड एट अल ने 100 से अधिक घुटनों के लिए इंट्राऑपरेटिव संतुलन और बोनी रिसेक्शन डेटा को देखा। 11 उन्होंने नोट किया कि सभी प्रीऑपरेटिव योजनाओं को अंतःक्रियात्मक रूप से समायोजित किया गया था, भले ही गठिया रोग की डिग्री या घुटने की विकृति का प्रकार हो। इंट्राऑपरेटिव समायोजन 97% घुटनों में फ्लेक्सन में औसत और पार्श्व अंतराल और 100% घुटनों में विस्तार के बीच 1-मिमी अंतर के भीतर संतुलन प्राप्त करने में सक्षम थे। 12 इसके अलावा, अधिकांश घुटनों को संतुलन के लिए नरम ऊतक रिलीज की आवश्यकता नहीं थी। हड्डी में कटौती करने से पहले संयुक्त संतुलन की भविष्यवाणी करने और घटक की स्थिति को समायोजित करने की क्षमता के परिणामस्वरूप परिशुद्धता के लिए रोबोटिक-सहायता प्राप्त तकनीक के साथ एक संतुलित शोधन तकनीक में वृद्धि होती है।
टीकेए सर्जरी में अच्छे नैदानिक परिणामों को निर्धारित करने में एक और कारक उचित प्रत्यारोपण आकार का उपयोग कर रहा है। हालांकि हमेशा आवश्यक नहीं होता है, प्रीऑपरेटिव प्लानिंग उचित इम्प्लांट आकार का अनुमान लगाने में मदद कर सकती है। आरएटीकेए तकनीक प्रीऑपरेटिव 3 डी सीटी आधारित टेम्पलेट पर आधारित है जो सर्जन को इम्प्लांट आकार की सटीक भविष्यवाणी करने की अनुमति देता है। भिमानी एट अल ने लगातार 54 रोगियों को देखा, जिन्होंने माको आरएटीकेए प्रणाली के साथ आरएटीकेए से गुजरना पड़ा, जिसने प्रीऑपरेटिव इम्प्लांट आकार टेम्पलेट प्रदान किया। इम्प्लांट आकार में परिवर्तन इंट्राऑपरेटिव रूप से किए गए थे जैसे कि ऊरु नॉचिंग से बचना, इम्प्लांट ओवरहैंग से बचना या कम करना, और कॉर्टिकल संपर्क का अधिकतमकरण। अध्ययन से पता चला कि सॉफ्टवेयर ने ऊरु घटकों के 96% और टिबियल घटकों के 89% के सटीक घटक आकार की भविष्यवाणी की, और कोई भी टेम्पलेट 1 से अधिक आकार से बंद नहीं था। 15 इसके अलावा, ऊरु घटक या टिबियल घटक पर नॉचिंग या इम्प्लांट ओवरहैंग के कोई मामले नहीं थे। 15 अन्य अध्ययनों ने मानक रेडियोग्राफ का उपयोग करके इम्प्लांट आकार टेमप्लेटिंग को 43.6% से 68% सटीक दिखाया है, यह समझाते हुए कि अभ्यास आम नहीं है। 16, 17
लगभग सभी नई शल्य चिकित्सा तकनीकों के साथ, आरएटीकेए के साथ एक सीखने की अवस्था है। सोढ़ी एट अल ने आरएटीकेए के साथ सीखने की अवस्था का आकलन किया और पाया कि एक सर्जन कुछ महीनों के भीतर किसी भी ऑपरेटिव समय को नहीं जोड़ने के बिंदु तक तकनीक के साथ सहज हो सकता है। 18
कुछ अध्ययनों ने विभिन्न प्रकार के रोगी-रिपोर्ट किए गए परिणाम उपायों का उपयोग करके पारंपरिक मैनुअल टीकेए की तुलना में आरएटीकेए रोगियों में काफी कम औसत दर्द स्कोर, बेहतर समग्र शारीरिक कार्य स्कोर, अधिक रोगी संतुष्टि और नैदानिक परिणाम, और कम भूले हुए संयुक्त स्कोर की सूचना दी है। 19, 20 यद्यपि इस अपेक्षाकृत नई तकनीक के साथ दीर्घकालिक परिणामों और बड़ी आबादी वाले अध्ययन की आवश्यकता है, प्रारंभिक नैदानिक परिणाम आशाजनक हैं।
इस सर्जरी में उपयोग किए जाने वाले विशेष उपकरणों में स्ट्राइकर द्वारा माको टीकेए सिस्टम शामिल है।
हमारे पास खुलासा करने के लिए कुछ नहीं है।
इस वीडियो लेख में संदर्भित रोगी ने फिल्माने के लिए अपनी सूचित सहमति दी है और वह जानता है कि जानकारी और छवियां ऑनलाइन प्रकाशित की जाएंगी।
Citations
- संयुक्त राज्य अमेरिका में घुटने के पुराने ऑस्टियोआर्थराइटिस की व्यापकता: तीसरे राष्ट्रीय स्वास्थ्य और पोषण परीक्षा सर्वेक्षण 1991-94 से गठिया डेटा। जे रुमेटील। 2006;33:2271-2279.
- एएओएस कुल घुटने और हिप रिप्लेसमेंट प्रोजेक्शन 2030। http://www.prnewswire.com/news-releases/total-knee-and-hip-replacement-surgery- अनुमान-शो-उल्का प्रकाश-2030-55519727.html। अभिगमन तिथि 17 सितंबर 2019.
- जौरेगुई जेजे, चेरियन जेजे, पियर्स टीपी, बीवर डब्ल्यूबी, इस्सा के, मोंट एमए। कुल घुटने आर्थ्रोप्लास्टी के बाद दीर्घकालिक उत्तरजीविता और नैदानिक परिणाम। जे आर्थ्रोप्लास्टी। 2015;30:2164-6. दोई: 10.1016/ j.arth.2015.05.052.
- इंग्लैंड, वेल्स, उत्तरी आयरलैंड और आइल ऑफ मैन के लिए राष्ट्रीय संयुक्त रजिस्ट्री (एनजेआर) 13 वीं वार्षिक रिपोर्ट। पर उपलब्ध है: https://reports.njrcentre.org.uk/। अभिगमन तिथि 17 सितंबर 2019.
- कंप्यूटर-असिस्टेड सर्जरी और टोटल नी आर्थ्रोप्लास्टी का घूर्णी संरेखण। कुल घुटने आर्थ्रोप्लास्टी 2005 (पीपी 254-257)। स्प्रिंगर, बर्लिन, हीडलबर्ग।
- टिबियल इम्प्लांट का पश्चवर्ती ढलान और यूनिकम्पार्टमेंटल घुटने आर्थ्रोप्लास्टी का परिणाम। जे बोन जॉइंट सर्ग एम। 2004 मार्च; 86 (3): 506-11। दोई: 10.2106/00004623-200403000-00007.
- उलरिच एसडी, सेलर टीएम, बेनेट डी, एट अल। कुल हिप आर्थ्रोप्लास्टी: संशोधन के कारण क्या हैं? आईएनटी ऑर्थोप। 2008;32:597-604. दोई: 10.1007/s00264-007-0364-3.
- हैम्प ईएल, चुगताई एम, स्कोल एलवाई, एट अल। रोबोटिक-आर्म असिस्टेड टोटल नी आर्थ्रोप्लास्टी ने मैनुअल तकनीकों की तुलना में योजना बनाने के लिए अधिक सटीकता और सटीकता का प्रदर्शन किया। जे नी सर्ग। 2019;32:239-50. दोई: 10.1055/s-0038-1641729.
- बुकोव्स्की बीआर, एंडरसन पी, ख्लोपास ए, चुगताई एम, मोंट एमए। मैनुअल कुल हिप आर्थ्रोप्लास्टी की तुलना में रोबोट के साथ बेहतर कार्यात्मक परिणाम। Surg Technology Int. 2016;29:303-8.
- मिस्त्री जेबी, एल्मल्लाह आरके, चुगताई एम, ओकटेम एमई, हारविन एस, मोंट एम. लंबे समय तक जीवित रहने और कुल घुटने आर्थ्रोप्लास्टी के एकल त्रिज्या के नैदानिक परिणाम। Surg Technology Int. 2016;28:247-51.
- मार्चंड आरसी, भौमिक-स्टोकर एम, स्कोल एल, रॉड्रिक्ज़ एल रोबोटिक-आर्म असिस्टेड टोटल नी आर्थ्रोप्लास्टी के लिए बैलेंस्ड रिसेक्शन सर्जिकल तकनीक। एओए वार्षिक बैठक, 8-12 अक्टूबर, 2017, एडिलेड, ऑस्ट्रेलिया।
- मार्चंड आर, भौमिक-स्टोकर एम, स्कूल एल, रॉड्रिक्ज़ एल रोबोटिक-असिस्टेड टोटल घुटने आर्थ्रोप्लास्टी के लिए बैलेंस्ड रिसेक्शन सर्जिकल तकनीक। सार एओए वार्षिक बैठक, 8-12 अक्टूबर, 2017, एडिलेड, ऑस्ट्रेलिया।
- गोंजालेज एमएच, मेखाइल एओ। असफल कुल घुटने आर्थ्रोप्लास्टी: मूल्यांकन और एटियलजि। जे एम अकैड ऑर्थोप सुर्ग। 2004;12:436–46. दोई: 10.5435/00124635-200411000-00008.
- हर्नांडेज़-वाकेरो डी, अबाट एफ, सारस्केट जे, मोनलाऊ जेसी। कुल घुटने आर्थ्रोप्लास्टी में मानकीकृत टेमप्लेटिंग के साथ प्रीऑपरेटिव माप की विश्वसनीयता। वर्ल्ड जे ऑर्थोप। 2013;4:287-90. दोई: 10.5312/ wjo.v4.i4.287.
- भीमानी एस, भिमानी आर, फेहर ए, मलकानी ए रोबोटिक-असिस्टेड टोटल घुटने आर्थ्रोप्लास्टी के लिए 3 डी प्रीप्लानिंग सॉफ्टवेयर का उपयोग करके प्रीऑपरेटिव इम्प्लांट साइजिंग की सटीकता। AAHKS 2017 वार्षिक बैठक। 2-5 नवंबर 2017। डलास, टेक्सास।
- कुल घुटने के आर्थ्रोप्लास्टी में एटिगर एम, क्लेसेन एल, पेस पी, कैलीस टी 2 डी बनाम 3 डी टेमप्लेटिंग। घुटने। 2016;23:149-151. दोई: 10.1016/ j.ne.2015.08.014.
- ट्रिकेट आरडब्ल्यू, हॉजसन पी, फोर्स्टर एमसी, रॉबर्टसन ए। कुल घुटने के प्रतिस्थापन में डिजिटल टेमप्लेटिंग की विश्वसनीयता और सटीकता। जे बोन जॉइंट सर्ग बीआर। 2009;9:903-6. दोई: 10.1302/0301-620X.91B7.21476.
- सोढ़ी एन, ख्लोपास ए, पिउजी एनएस, एट अल। रोबोटिक कुल घुटने आर्थ्रोप्लास्टी से जुड़ा सीखने का वक्र। जे नी सर्ग। 2018;31:017-21. दोई: 10.1055/s-0037-1608809.
- मार्चंड आरसी, सोढ़ी एन, ख्लोपास ए, एट अल। रोबोटिक-आर्म असिस्टेड टोटल नी आर्थ्रोप्लास्टी के बाद रोगी संतुष्टि के परिणाम: एक अल्पकालिक मूल्यांकन। जे नी सर्ग। 2017;30:849-853. दोई: 10.1055/s-0037-1607450.
- ऑस्ट्रेलियाई अनुभव माको रोबोटिक टीकेए। एओए वार्षिक बैठक, 8-12 अक्टूबर, 2017, एडिलेड।
Cite this article
माको रोबोटिक-आर्म ने कुल घुटने आर्थ्रोप्लास्टी की सहायता की। जे मेड इनसाइट। 2023;2023(214). दोई: 10.24296/
Procedure Outline
Table of Contents
- 1. परिचय
- 2. रोगी स्थिति
- 3. सर्जिकल दृष्टिकोण
- 4. पटेलर हड्डी तैयारी
- 5. हड्डी सरणी प्लेसमेंट
- 6. पटेलर सीमेंटिंग
- 7. रोबोट लैंडमार्क अंशांकन
- 8. Osteophyte हटाने
- 9. इंट्राऑपरेटिव लिगामेंट और गैप संतुलन
- 10. रोबोटिक फेमोरल ओस्टियोटॉमी
- 11. टिबियल रोबोट Osteotomy
- 12. इम्प्लांट परीक्षण और सुधार
- 13. फाइनल इम्प्लांट प्लेसमेंट और चेक पोजिशनिंग
- 14. बंद करना
- 15. पोस्ट-ऑप टिप्पणियाँ
- प्रीऑपरेटिव प्लानिंग
- प्रीऑपरेटिव सीटी स्कैन एक आभासी हड्डी मॉडल प्रदान करता है जिसका उपयोग प्रदान किए गए सॉफ़्टवेयर पर वर्चुअल इम्प्लांट टेम्प्लेट का उपयोग करके हड्डी के कट के साथ-साथ प्रत्यारोपण आकार, संरेखण और स्थिति की योजना बनाने के लिए किया जा सकता है।
- कुल मिलाकर अंग संरेखण को संयुक्त फीमर और टिबिया घटक रोटेशन और वरस / वाल्गस के साथ जांचा जा सकता है।
- सॉफ्टवेयर पर कई फाइन-ट्यून समायोजन किए जा सकते हैं और बाद में घुटने की कीनेमेटिक्स और नरम ऊतक तनाव सहित अधिक नैदानिक और वास्तविक समय की जानकारी के साथ संपादित किया जा सकता है।
- शारीरिक स्थलों को सीटी स्कैन पर परिभाषित किया जाता है और माको उत्पाद विशेषज्ञ द्वारा इसके आधार पर एक प्री-ऑप योजना विकसित की जाती है जो इसे समीक्षा के लिए सर्जन को प्रस्तुत करता है।
- प्रीप प्लान में डिस्टल फीमर, पश्चवर्ती फीमर और समीपस्थ टिबिया और इम्प्लांट आकार, रोटेशन / संरेखण और स्थिति दोनों की रिसेक्शन मोटाई शामिल है।
- ओआर से पहले रोगी को तैयार करें
- क्लिपर का उपयोग करके घुटने के चारों ओर त्वचा को शेव करें।
- ओआर में रोगी को तैयार करें
- रोगी को उनके धड़ पर एक सुरक्षित बेल्ट के साथ लापरवाह स्थिति में रखा जाता है और टेबल के किनारे के करीब ऑपरेटिव साइड होता है।
- आमतौर पर, या तो कूल्हे के नीचे एक टक्कर या कूल्हे / समीपस्थ जांघ के पार्श्व पक्ष पर एक पोस्ट का उपयोग अंग के प्राकृतिक बाहरी रोटेशन को रोकने और पैर को यथासंभव तटस्थ रखने के लिए किया जाता है। मैं एक पार्श्व पोस्ट का उपयोग करना चुनता हूं।
- रोगी की जांघ पर एक गैर-बाँझ टॉर्निकेट ऊंचा रखा जाता है।
- बाँझ
- शल्य चिकित्सा प्रेप समाधान और सर्जन की पसंद की तकनीक का उपयोग करके घुटने को निष्फल किया जाता है। मैं क्लोरहेक्सिडीन स्क्रब ब्रश के साथ प्री-स्क्रब करता हूं, अंग को सुखाता हूं, और फिर क्लोराप्रेप घोल के साथ पैर तैयार करता हूं।
- मैं सर्जिकल तैयारी में पैर को शामिल नहीं करता हूं, लेकिन कोई ऐसा करना चुन सकता है।
- ड्रेप
- रोगी को टीकेए के लिए सर्जन के वांछित तरीके से लपेटा जाता है।
- साइड बार पर बाँझ क्लैंप लगाने के लिए बिस्तर के ऑपरेटिव साइड के किनारे पर ड्रेप साइड बार पर लपेटने की एक परत से अधिक नहीं होना चाहिए।
- बहुत सारे ड्रेप इसे साइड बार पर उनके ऊपर क्लैंप रखने के लिए बहुत मोटा बनाते हैं।
- लेग पोजिशनर सेट करें
- माको द्वारा प्रदान किया गया एक लेग पोजिशनर है जो ऑपरेटिव साइड रेल पर बाँझ क्लैंप से जुड़ा हुआ है। पोजिशनर में एक बाँझ कार्बन रेल शामिल है, एक आधार जो समायोज्य है और रेल के ऊपर और नीचे स्लाइड करता है, और पैर को अंदर रखने के लिए एक बूट। मैं बूट का उपयोग नहीं करना चुनता हूं और इसके बजाय पैर को आधार पर ही रखता हूं।
- रोबोट सेट अप करें
- माको रोबोट, टॉवर, मॉनिटर और सॉफ्टवेयर माको उत्पाद विशेषज्ञ द्वारा स्थापित और तैनात किए जाते हैं।
- रोबोट ऑपरेटिव साइड से आता है और कैमरा विपरीत दिशा में स्थित है। कैमरे को ऑपरेटिव घुटने तक दृष्टि की सीधी रेखा की आवश्यकता होती है जहां सरणियों को रखा जाएगा। रोबोट हाथ को बाँझ स्क्रब तकनीशियन द्वारा लपेटा और इकट्ठा किया जाता है। माको उत्पाद विशेषज्ञ सर्जरी से पहले रोबोट और उसके बाँझ उपकरणों को पंजीकृत करने के लिए स्क्रब तकनीशियन के साथ भी काम करता है।
- मानक साइट-विशिष्ट फैशन में सर्जिकल टाइमआउट का संचालन करें
- माको उत्पाद विशेषज्ञ सर्जन के साथ रोगी के नाम, रोगी आईडी, ऑपरेटिव साइड और इम्प्लांट सिस्टम की पुष्टि करता है।
- या तो सामान्य या क्षेत्रीय संज्ञाहरण का उपयोग किया जा सकता है। एक सहायक के रूप में, ऊरु या जोड़ नहर तंत्रिका ब्लॉकों का उपयोग पूर्व या पोस्टऑपरेटिव रूप से किया जा सकता है। रोगनिरोधी एंटीबायोटिक्स दिए जाते हैं। पैर को 30 सेकंड या उससे अधिक समय तक उठाने और पकड़ने के द्वारा एस्मार्क या गुरुत्वाकर्षण का उपयोग करके निकाला जा सकता है। मैं गुरुत्वाकर्षण उत्सर्जन का उपयोग करता हूं और टॉर्निकेट को आमतौर पर 275 मिमीएचजी तक फुलाता हूं।
- मिडलाइन त्वचा चीरा
- एक मध्य रेखा त्वचा चीरा क्वाड्रिसेप्स कण्डरा के बेहतर किनारे से टिबियल ट्यूबरकल के इन्फेरोमेडियल पहलू तक बनाया जाता है जिसमें घुटने फ्लेक्स होते हैं। तेज विच्छेदन कैप्सूल के स्तर तक किया जाता है।
- मेडियल आर्थ्रोटॉमी
- एक औसत दर्जे का पैरापेटेलर आर्थ्रोटॉमी बनाया जाता है। घुटने को बढ़ाया जाता है और वसा पैड जारी किया जाता है, पेटेला उल्टा होता है, और घुटने को फिर से फ्लेक्स किया जाता है। हमारे रोगी को पूर्ण मोटाई वाले ट्राइकम्पार्टमेंटल एंड-स्टेज अपक्षयी संयुक्त रोग होने की पुष्टि की गई थी जो प्रमुख उपचारात्मक और पेटेलोफेमोरल था। ओस्टियोफाइट्स को रोबोटिक हाथ के साथ सटीक हड्डी पंजीकरण की अनुमति देने के लिए छोड़ दिया जाता है।
- एसीएल रिसेक्शन
- एसीएल को ऊरु नॉच और टिबिया सम्मिलन से हटा दिया जाता है। मैं एक पश्चवर्ती स्थिर घुटने का उपयोग करता हूं, इसलिए पीसीएल को नॉच से भी हटा दिया जाता है।
- रिसर्फेसिंग
- मैं हर टीकेए में पेटेला को फिर से पेश करना चुनता हूं। मैं फेमोरल और टिबियल कट से पहले ऐसा करता हूं। इस रोगी के पेटेला को 24 मिमी मोटा मापा गया था, इसलिए मैंने पेटेला बटन की मोटाई से मेल खाने के लिए 10 मिमी की दूरी तय की।
- इम्प्लांट प्लेसमेंट
- एक आकार 32 पेटेला बटन को उपयुक्त माना गया था और इस बिंदु पर लुगोले ड्रिल किए जाते हैं। पल्स सिंचाई का उपयोग पेटेला की कटी हुई सतह को साफ करने के लिए किया जाता है और असली इम्प्लांट को जगह-जगह सीमेंट किया जाता है और कसकर दबाया जाता है। घुटने की तैयारी के शेष के दौरान सीमेंट को सख्त होने की अनुमति दी जाती है। मैं सभी पेटेला प्रत्यारोपण को सीमेंट करता हूं।
- माको के लिए फेमोरल पिन डालें
- दो 4.0-मिमी ड्रिल पिन डिस्टल फेमोरल मेटाफिसिस के लिए तय किए गए हैं।
- टिबियल पिन डालें
- समीपस्थ टिबिया मेटाफिसिस के लिए दो 4.0-मिमी ड्रिल पिन तय किए जाते हैं।
- टिबियल एरे रखें
- सरणियों को समायोजित करें ताकि वे बिना किसी बाधा के कैमरे द्वारा दिखाई दें। कैमरे को माको उत्पाद विशेषज्ञ द्वारा भी समायोजित किया जा सकता है ताकि दोनों सरणियां गति के घुटने के आर्क में दिखाई दें।
- ऊरु सरणी रखें
- फेमोरल और टिबियल चेकपॉइंट रखें
- उन्हें कठोर हड्डी में रखा जाना चाहिए और भविष्य में हड्डी के कट से दूर रखा जाना चाहिए। मैं फीमर चेकपॉइंट को मेडियल एपिकॉन्डाइल और टिबिया चेकपॉइंट को पूर्ववर्ती समीपस्थ डायफिसिस में रखता हूं। चेकपॉइंट स्थानों को कुंद जांच का उपयोग करके पंजीकृत किया जाता है।
- हिप सेंटर
- रोगी के कूल्हे को लगातार और अलग-अलग पैटर्न में परिचालित किया जाता है जब तक कि प्रगति पट्टी सॉफ्टवेयर पर 100% तक नहीं पहुंच जाती है।
- मल्लियोली
- कुंद जांच का उपयोग औसत दर्जे के मॉलोलस के केंद्र और पार्श्व मॉलोलस के केंद्र की पहचान करने के लिए किया जाता है। एक बार जब जांच की नोक प्रत्येक मल्लोली पर ठीक से रखी जाती है, तो कंप्यूटर बिंदुओं को पंजीकृत करता है।
- पंजीकरण
- फीमर और टिबिया पंजीकरण में प्रत्येक के लिए कई बिंदु होते हैं जो सीटी स्कैन के आधार पर सॉफ्टवेयर द्वारा मॉनिटर पर दिखाए जाते हैं। फीमर पर प्रत्येक बिंदु को पंजीकृत करने के लिए एक तेज जांच का उपयोग किया जाता है जो आभासी तस्वीर से मेल खाती है। स्थान को वर्चुअल चित्र से बिल्कुल मेल खाने की आवश्यकता नहीं है, लेकिन यथोचित करीब होना चाहिए।
- तेज जांच का उपयोग किया जाता है क्योंकि पंजीकरण बिंदु हड्डी पर एकत्र किए जाने चाहिए, उपास्थि पर नहीं, इसलिए तेज जांच हड्डी की सतह पर जाने के लिए किसी भी उपास्थि में प्रवेश कर सकती है।
- बोनी सतह में प्रवेश नहीं करना महत्वपूर्ण है।
- यदि कोई बिंदु ओस्टियोफाइट के नीचे दफन है और पहुंचने में बहुत मुश्किल है, तो हड्डी के करीब एक स्थान चुनें।
- बड़े सत्यापन बिंदुओं की एक छोटी मात्रा तब मॉनिटर पर दिखाई जाती है जिसे फीमर और टिबिया दोनों पर एकत्र और मिलान करने की आवश्यकता होती है।
- एक बार जब फीमर और टिबिया पूरी तरह से पंजीकृत हो जाते हैं, तो मैं सभी ओस्टियोफाइट्स को हटा देता हूं।
- मापा रिसेक्शन बनाम गैप बैलेंसिंग
- माको सिस्टम आपको एक मापा रिसेक्शन वर्कफ़्लो और लिगामेंट बैलेंसिंग (या गैप बैलेंसिंग) वर्कफ़्लो के बीच चयन करने की अनुमति देता है।
- मैं एक मापा-शोधन तकनीक का उपयोग करता हूं।
- घुटने के फ्लेक्सन, वरस / वाल्गस और रोटेशन सहित घुटने यांत्रिकी को स्क्रीन पर दिखाया जाता है और घुटने की स्थिति के अनुरूप वास्तविक समय में अपडेट किया जाता है।
- सबसे पहले, मैं पैर को विस्तार में लाता हूं और किसी भी फ्लेक्सन कॉन्ट्रैक्टर या रिकर्वेटम को नोट करता हूं।
- इस मामले में, घुटने में 8-डिग्री वरस संरेखण के साथ पूर्ण विस्तार था, जो शिथिल था और इसे 1 डिग्री वाल्गस के तटस्थ से ठीक किया जा सकता था।
- घुटने गति के पूरे चाप में वरस और वाल्गस के लिए थोड़ा ढीला था, इसलिए मुझे लगा कि एक रूढ़िवादी डिस्टल फीमर रिसेक्शन का संकेत दिया गया था।
- सॉफ़्टवेयर समायोजन
- सममित रूप से संतुलन और अंतर करने के लिए माको सॉफ्टवेयर पर उचित समायोजन किए गए थे।
- रोगी के बोनी और नरम ऊतक शरीर रचना विज्ञान के लिए सॉफ्टवेयर पर किए जाने वाले समायोजन की एक मजबूत संख्या है।
- सॉफ्टवेयर ने ऊरु और टिबियल घटकों को आकार 3 तक आकार दिया।
- हड्डी की गुणवत्ता अच्छी थी इसलिए मुझे लगा कि एक प्रेस-फिट निर्माण उचित था।
- हड्डी के कटने का क्रम सर्जन की वरीयता पर सेट किया जा सकता है।
- नरम ऊतकों की रक्षा के लिए रोबोट द्वारा निर्धारित आभासी सीमाओं के भीतर कटौती की जाती है।
- जरूरत पड़ने पर इन सीमाओं का विस्तार किया जा सकता है।
- डॉक रोबोट
- डिस्टल रिसेक्शन
- पश्चवर्ती चैम्फर रिसेक्शन
- पूर्वकाल शोधन
- पश्चवर्ती शोधन
- पूर्वकाल चैम्फर रिसेक्शन
- जांच और सफाई
- एक बार कट हो जाने के बाद, मैं जोड़ में एक लैमिनार स्प्रेडर रखता हूं, जो मुझे पीछे के घुटने की कल्पना करने की अनुमति देता है जहां मैं किसी भी मेनिस्कस अवशेष, पीसीएल अवशेष और पश्चवर्ती ओस्टियोफाइट्स को हटा देता हूं।
- मेडियल रिसेक्शन
- पार्श्विक शोधन
- इंजेक्ट मार्केन
- इस मामले में, घुटने को 9 मिमी पॉलीथीन डालने के साथ परीक्षण किया गया था।
- घुटने में 10 डिग्री विस्तार अंतराल था, जिसे मैं 0 डिग्री तक ओवरप्रेशर के साथ सही कर सकता था।
- घुटने गुरुत्वाकर्षण के साथ 125 डिग्री तक फ्लेक्स हो गए।
- मैंने महसूस किया कि कुल मिलाकर गति के पूरे चाप में वरस / वाल्गस स्थिरता तंग थी।
- मैंने टिबिया से अतिरिक्त 1 मिमी निकालने का फैसला किया।
- अतिरिक्त शोधन करने के लिए रोबोटिक हाथ को वापस लाया गया था।
- हाथ एक अत्यधिक सटीक शोधन का मार्गदर्शन करने में सक्षम है, जो पिछले शोधन के समान यांत्रिक संरेखण में ठीक 1 मिमी अधिक है।
- इसके बाद घुटने का फिर से परीक्षण किया गया। अब, यांत्रिकी में सुधार किया गया था।
- घुटने पूर्ण विस्तार पर आ गया और गुरुत्वाकर्षण के साथ 130 डिग्री तक फ्लेक्स हो गया।
- यह वरस / वाल्गस के लिए स्थिर था और अत्यधिक तंग नहीं था।
- पटेला को केंद्रीय रूप से ट्रैक किया गया।
- रोबोट हाथ को फिर मैदान से हटा दिया जाता है।
- ऊरु लुगोले ड्रिल किए गए थे और बॉक्स कट को पश्चवर्ती स्थिर ऊरु घटक के लिए बनाया गया था।
- टिबिया के रोटेशन पर कील पंच का उपयोग किया गया था और 4 छोटे लुगोल ड्रिल किए गए थे।
- टिबियल बेस प्लेट प्लेसमेंट
- वास्तविक आकार # 3 टिबियल बेसप्लेट जगह में प्रभावित हुआ था।
- फेमोरल घटक प्लेसमेंट
- वास्तविक आकार # 3 पीएस ऊरु घटक जगह में प्रभावित हुआ था।
- दोनों घटकों में लगभग 100% बोनी संपर्क के साथ उत्कृष्ट आंतरिक स्थिरता थी।
- लाइनर सम्मिलन
- 9-मिमी पॉलीथीन लाइनर को उपयुक्त माना गया और जगह में प्रभावित किया गया।
- प्रचुर मात्रा में सिंचाई की जाती है।
- टूर्निकेट को फुलाया जाता है, और हेमोस्टेसिस को इलेक्ट्रोकेटरी का उपयोग करके प्राप्त किया जाता है।
- स्तरित सीवन बंद
- मैं # 2 क्विल सीवन के साथ आर्थ्रोटॉमी बंद करता हूं।
- फिर मैं एक गहरी ऊतक परत को बंद करने के लिए 0 विक्रिल सीवन का उपयोग करता हूं।
- मैं 2-0 विक्रिल चमड़े के नीचे उपयोग करता हूं।
- मैं 3-0 मोनोक्रिल सबक्यूटिकुलर का उपयोग करता हूं।
- एक बाँझ पट्टी लगाई जाती है, और रोगी को संज्ञाहरण से जागने की अनुमति दी जाती है।
Transcription
अध्याय 1
हाय दोस्तों. मैं डॉ जेफरी ज़रीन हूँ। हम एक माको रोबोटिक-आर्म का प्रदर्शन करने जा रहे हैं आज कुल घुटने आर्थ्रोप्लास्टी में सहायता मिली, और उन चीजों में से एक जो हम जा रहे हैं हम कंप्यूटर तकनीक का उपयोग कैसे करते हैं शल्य चिकित्सा के लिए प्रीऑपरेटिव योजना बनाने के लिए, जो इस तकनीक से संबंधित इम्प्लांट लाभों में से एक है। तो जब भी हम इन कार्यों में से एक करें, रोगी का एक 3 डी मॉडल उत्पन्न होता है सीटी स्कैन का उपयोग करना, और यह उत्पन्न होता है के तीन विचारों के प्रकार ऊरु और टिबियल हड्डी। और हम सक्षम हैं कंप्यूटर का उपयोग करके उनमें हेरफेर करें रोगी की शारीरिक रचना का आकलन। तो इस रोगी में, प्रमुख गठिया है औसत दर्जे के डिब्बे में। यह एक बायां घुटना है, और एक बड़ा औसत दर्जे का है ओस्टियोफाइट जिसे यहां देखा जा सकता है – और हमें इसे अंदर लेना होगा ऑपरेशन के हिस्से के रूप में विचार। स्क्रीन पर दिखाई देने वाली संख्याएँ दर्शाती हैं संरेखण और हड्डी हम सर्जरी के लिए कैसे योजना बनाने जा रहे हैं, इसके सापेक्ष शोधन, और इसलिए प्रारंभिक योजना प्रक्रिया का चरण सिर्फ है प्रत्यारोपण को उचित रूप से मिलान करने के लिए आकार दें एक अधिक मापा शोधन प्रकार की तकनीक में हड्डी। फिर सर्जरी के दौरान, आप देख पाएंगे कि कैसे हम लिगामेंट टेंशनिंग का उपयोग करने में सक्षम हैं और सक्रिय में कीनेमेटिक्स - या लाइव समायोजन जो आधारित किया जा सकता है उनके गठिया से संबंधित रोगी की विशिष्ट शारीरिक रचना पर। तो यह एक है - यह है शुरुआती बिंदु, इसलिए फिर कंप्यूटर तकनीक का उपयोग करना, हम जगह देने में सक्षम हैं एक इम्प्लांट। यह एक ट्रायथलॉन स्ट्राइकर सिस्टम घुटने का उपयोग करता है यह एकमात्र वर्तमान प्रत्यारोपण है इस तकनीक और उपकरण के लिए। तो इस पर आधारित, वे कई आकारों में आते हैं, लेकिन आकार 3 वह है जो हड्डी को फिट करता है उचित। और यह एक प्रारंभिक स्थिति है, तो यह एक आभासी प्रस्तुति की अनुमति देता है जहां हड्डी के अलग-अलग टुकड़े होंगे। इसलिए प्रत्यारोपण के बिना, मुझे एक समझ मिलती है तीनों में से एक में – कोरोनल, धनु, और फ्लेक्स घुटने दृश्य, मैं सक्षम हूं यह देखने के लिए कि लकीरें कहां होने जा रही हैं सटीक स्थिति की अनुमति देने के लिए इम्प्लांट का। उदाहरण के लिए, यह घुटना ऐसा लगता है जैसे यह लेने जा रहा है थोड़ी बहुत अधिक हड्डी पूर्वकाल में, ताकि आप लक्ष्य को स्थानांतरित कर सकें और फिर अनुकूलन के लिए घुटने को फ्लेक्स करें या घुटने का विस्तार करें इम्प्लांट की स्थिति। यह पूर्ववर्ती फीमर को कम कर रहा होगा फ्लेक्सन की इस मात्रा में, इसलिए – इसलिए मैं इसे वहां सेट करूंगा जहां यह होगा। रोबोटिक हाथ देता है अलर्ट कि क्या मेरे पास बहुत अधिक संयुक्त फ्लेक्सन या एक्सटेंशन है। अभी, के साथ 6 डिग्री फ्लेक्सन और 3 डिग्री ढलान, बहुत अधिक संयुक्त है, इसलिए मैं इसे लगभग 5 डिग्री तक वापस करना चाहता हूं। और फिर संभावित रूप से हम कर सकते हैं इम्प्लांट को थोड़ा सा पूर्ववर्ती करें, और यह एक बहुत साफ और करीबी बना देगा इम्प्लांट के लिए रिसेक्शन। यहन एक 0-डिग्री मैकेनिकल एक्सेस है जिसे हम स्थापित कर रहे हैं, लेकिन इस रोगी ने एक वरस संरेखण जिसे हम कल्पना कर सकते हैं प्री-ऑप रेडियोग्राफ पर। और हम सक्षम होंगे इसे अनुकूलित करने के लिए, लेकिन मैं आमतौर पर वारस की एक डिग्री लूंगा टिबिया कुछ स्क्लेरोटिक हड्डी को कम करने के लिए उपचारात्मक रूप से - और कभी-कभी यह जरूरत है समायोजित किया जाना चाहिए। तो अंत में, मैं इम्प्लांट के साथ मेडियोलेटरल की जांच करता हूं। अगर हम इम्प्लांट पर एक आकार ऊपर जाना था, आप देख सकते हैं कि यह कैसे यहां कोने में ओवरहैंगिंग है, और मैं पीछे की ओर जांच कर सकता हूं – और यह पीछे की ओर बढ़ रहा है। तो मुझे लगता है कि आकार 4 बहुत बड़ा है, इसलिए हम इसके लिए नकारात्मक होंगे 3, जो पीछे की ओर एक बेहतर उपस्थिति देता है। तो वहां आप कर सकते हैं देखें कि पोस्टरोमेडियल ओस्टियोफाइट हैं और कुछ पोस्टरोलेटरल ओस्टियोफाइट यह घुटने के अंतर और संतुलन को प्रभावित कर सकता है। फिर एक बार प्रारंभिक इम्प्लांट स्थिति का चयन किया जाता है, फिर सीटी-आधारित दृश्य होता है। इसलिए यहां टिबिया पर ध्यान केंद्रित करते हुए, मैं जांच करता हूं और सुनिश्चित करता हूं कि इम्प्लांट होने जा रहा है हड्डी के ठीक बीच में। मैं आमतौर पर कुछ डिग्री डालता हूं टिबिया पर ढलान पश्चवर्ती स्थिर निर्माण का उपयोग करने के बावजूद क्योंकि यह सिस्टम इसे सहन कर सकता है, और मुझे लगता है कि यह रोगी की शारीरिक रचना से थोड़ा मेल खाता है अधिक सटीक रूप से। और यहां वरस की 1 डिग्री टिबियल इम्प्लांट को रख रही है टिबियल नहर के केंद्र के ठीक नीचे, इसलिए मुझे लगता है कि यह होगा बहुत उचित. और फिर आखिरी आधार प्लेटों की जांच कर रहा है, इसलिए देखें बेस प्लेट, कुछ भी ओवरहैंगिंग नहीं है, सभी घटक उपयुक्त प्रतीत होते हैं, और यह अनिवार्य रूप से 0 डिग्री पर सेट है औसत दर्जे की सीमा के सापेक्ष टिबियल ट्यूबरकल। यह सर्जरी के दौरान समायोजित किया जा सकता है। ऊरु पक्ष पर, मैं यह सुनिश्चित करने के लिए पहले जांचें कि एक पूर्ववर्ती पायदान नहीं होने जा रहा है। तो - इम्प्लांट बहुत अच्छी तरह से लाइन करता है और रोगी की मूल पूर्ववर्ती हड्डी से मेल खाता है, और उपचारात्मक रूप से, इस इम्प्लांट के एकल चाप त्रिज्या की रूपरेखा ऐसा लगता है कि रोगी बहुत अच्छी तरह से मेल खाता है। पार्श्व रूप से, क्योंकि यह एक सममित प्रत्यारोपण है, आमतौर पर कुछ ओवरहैंगिंग होती है या पार्श्व पक्ष में विस्तारित धातु, जो कि बहुत विशिष्ट है क्योंकि देशी शरीर रचना विज्ञान की विषमता। अंतिम भाग यह है कि मैं रोटेशन की जांच करता हूं। यह कंपनी के प्लेसमेंट की अनुमति देता है ट्रांसएपिकॉन्डिलर अक्ष और पश्चवर्ती कोंडिलर अक्ष रेखाएं, और इसलिए आमतौर पर पीछे की धुरी आंतरिक घूर्णन से 3 डिग्री दूर है ट्रांसएपिकॉन्डिलर अक्ष के सापेक्ष, लेकिन इस घुटने में, वे वास्तव में बहुत करीब हैं। और इसलिए मैं जो करने की कोशिश करता हूं वह ट्रोक्लेया की नकल है, जो इम्प्लांट के साथ सफेद साइड लाइन होगी, इसलिए जैसा कि मैं इसका पालन करता हूं धातु हरे ट्रोचले के साथ गुलाबी रेखा, यह बहुत अच्छी तरह से मेल खा रहा है। तो कोई भी सर्जरी के दौरान उसमें समायोजन होगा संतुलन के हिस्से के रूप में फ्लेक्सन गैप। और अंत में, - एपी समकक्ष को देखते हुए, यह दिखता है और सुनिश्चित करता है कोई मेडियोलेटरल ओवरहैंग नहीं है, और जैसा कि हम पूर्ववर्ती रूप से आते हैं, पूर्वकाल फ्लैंग पार्श्व गटर में अधिक नहीं लटक रहा है, जो बहुत करीब दिखता है लेकिन बहुत अच्छा. तो फिर आखिरी बात यह सुनिश्चित करना है कि हमारा शोधन हो संख्याएं समझ में आती हैं, और इसलिए हम वर्तमान में इसके बारे में ले रहे हैं डिस्टल फीमर से 8.5 मिमी, जो मेरे लिए थोड़ा ज्यादा है। इसलिए मैं आमतौर पर 6 और 7 के बीच लेना पसंद करता हूं, इसलिए मैंने इसे दूर कर दिया है। फ्लेक्सन गैप को कसने के लिए - और अगर हमारा विस्तार अंतर तंग है, तो यह है रोबोटिक हाथ के साथ इसे उठाने के लिए फिर से योजना बनाना बहुत आसान है या कम। पूर्वकाल और पीछे की स्थिति के लिए भी यही बात लागू होती है ऊरु घटक की संख्या। 8 मिमी एक बहुत ही उचित औसत दर्जे का ऊरु कट है। यह यहां बहुत सममित है। वह नहीं है बहुत अधिक वजन वाले ऊरु कोंडिल कहाँ - जो आमतौर पर एक बड़ा शोधन होता है पार्श्विक की तुलना में उपचारात्मक रूप से। अगर यह पता चला है कि हम बाहरी रूप से पर्याप्त नहीं घूम रहे हैं, तो मैं कर सकता हूं इसे यहां पिन करें, और हम इसे प्राप्त करने के लिए बाहरी रूप से घूम सकते हैं अलग स्थिति, लेकिन जाहिर है, यह हमारे पूर्ववर्ती शोधन को प्रभावित करेगा। तो मैं शायद बस करूँगा इस से शुरू करें जहां हमने इसे पहले किया था - बाहरी रोटेशन में शायद एक और - और फिर हम समायोजन लाइव करेंगे ऑपरेशन के दौरान अंतर के आधार पर संतुलन शो। और यह काफी हद तक मानक है सर्जरी की योजना बनाने के लिए स्थापित। ऑपरेशन के दौरान समायोजन हो सकता है, जो इस पर निर्भर करता है इस स्क्रीन पर किए गए अंतराल के साथ क्या होता है, और आप देखेंगे ऑपरेशन के दौरान जैसा कि हम निचले दाएं कोने में अंतराल को मापते हैं स्क्रीन यह वास्तव में उद्देश्य माप देगा विस्तार और फ्लेक्सन अंतर उपचारात्मक और पार्श्व रूप से, और मैं नैदानिक के आधार पर समायोजन करूंगा घुटने के साथ-साथ महसूस करना मुझे कैसा लगता है कि यह सर्जरी के दौरान रिलीज होने जा रहा है। एक बार जब हम शुरू करते हैं, यह एक मानक के माध्यम से एक मानक औसत दर्जे का पैरापेटलर दृष्टिकोण है मध्य रेखा चीरा। शुरू में जब मैं इन सर्जरी कर रहा था, तो सरणी रोबोटिक हाथ को टिबिया में या टिबिया में एक अतिरिक्त आर्टिकुलर पिन की आवश्यकता होती है ऊरु शाफ्ट, लेकिन हम करने में सक्षम हैं सरणी की स्थिति को संशोधित करें ताकि आप देखेंगे कि पिन पूरी तरह से पिंजरे के भीतर हैं घुटने का मध्य रेखा चीरा – और यह एक बहुत ही मानक चीरा है। एक बार दृष्टिकोण पूरा हो जाने के बाद, मैं पहले पटेला तैयार करता हूं। पेटेला रिसेक्शन मेरे लिए एक फ्रीहैंड रिसेक्शन है, और मैं 10 मिमी का पता लगाता हूं, जो इम्प्लांट की मोटाई के बराबर है, और हम करेंगे ऑपरेशन के दौरान यह निर्णय लें। मैं जगह में पेटेलर बटन को सीमेंट करता हूं। मुझे लगता है कि 3-पेग सीमेंटेड पेटेलर बटन कम जटिलता है प्रोफ़ाइल, और इसलिए मैं प्रेस-फिट का उपयोग नहीं कर रहा हूं, लेकिन इस रोगी ने अच्छी हड्डी की गुणवत्ता और अपेक्षाकृत युवा और सक्रिय है, और इसलिए मैं इसे प्राथमिकता दे रहा हूं उन्हें सीमेंट किए बिना प्रेस-फिट इम्प्लांट डिजाइन का उपयोग करने के लिए काफी हद तक इसलिए कि यह अलग-अलग है रोबोटिक हाथ बहुत सममित है - बहुत सुसंगत। और इसलिए इसके लिए संपर्क करें हड्डी काफी अच्छी है, और मुझे इन प्रत्यारोपणों के साथ अच्छी सफलता मिली है। इसलिए पेटेला को बचाया जाता है, सीमेंट मिश्रित किया जाता है, लुगोले ड्रिल किए जाते हैं, और पेटेला को जगह में दबा दिया गया है। सबसे पहले और शुरू में, जबकि सीमेंट सख्त हो रहा है, बाकी घुटने तैयार हैं। ऊरु में दो पिन रखे गए हैं मेटाफिसिस और टिबियल मेटाफिसिस में दो कि आप देखेंगे कि सरणी हैं चिपका हुआ है, और फिर अगला कदम हड्डी को इसके साथ पंजीकृत करना है रोबोटिक हाथ और रोबोटिक केंद्रीय प्रोसेसर। सबसे पहले, गति का एक चाप है कूल्हे का केंद्र बनाने के लिए कूल्हे, और फिर औसत दर्जे का और पार्श्व टखने पर मल्लियोली पंजीकृत हैं। यह एक यांत्रिक अक्ष देगा अंग और रोबोटिक के साथ मान्य किया जा सकता है सीटी स्कैन जो प्रीऑपरेटिव रूप से किया जाता है एक लाइव इंट्राऑपरेटिव संरेखण मूल्यांकन की अनुमति देने के लिए। एक बार जब यह हो जाता है, तो हम जानते हैं यह यहां एक आकार 3 होने जा रहा है, इसलिए मुझे पंजीकरण करने की आवश्यकता है रोबोटिक बांह की हड्डी इसे टेम्पलेट से मेल खाने के लिए। तो वहाँ एक है छोटी जांच जो स्पर्श करने के लिए उपयोग की जाती है 30 से 35 अंक के बीच फीमर और टिबिया जो हड्डी को रोबोटिक टेम्पलेट में पंजीकृत करेंगे, और यह काफी जल्दी हो जाता है। एक बार ऐसा हो जाने के बाद, फिर संतुलन बनाया जाता है। इसलिए पंजीकरण के बाद ओस्टियोफाइट्स को हटा दिया जाएगा, और फिर अंतर संतुलन घुटने की गति के चाप के हिस्से के रूप में मूल्यांकन किया जाएगा। तो एक बार पंजीकरण हो जाने के बाद, रोबोटिक हाथ को मैदान में लाया जाता है, और फिर इसका उपयोग किया जाता है - हैप्टिक फीडबैक का उपयोग करते हुए, रोबोट हाथ के साथ इसके साथ जुड़ा हुआ दृश्य अलग-अलग बनाता है मेरे मार्गदर्शन के साथ। वहां हैं कभी-कभी इसके साथ कुछ मामूली समायोजन। क्योंकि पिन बहुत करीब हैं मैदान, मुझे कभी-कभी पैर को रखना पड़ता है इसे अनुमति देने के लिए बाहरी या आंतरिक रूप से घुमाया गया हाथ के मैदान के भीतर होना। मैंने पाया कि यह अनुमति देता है समय की संख्या को कम करने के लिए रोबोटिक हाथ के आधार की जरूरत स्थानांतरित किया जाना, क्योंकि जब पैर बहुत कठोर रूप से निश्चित स्थिति में होता है, तो आप इसे मैच करने के लिए हाथ प्राप्त करना होगा - जहां मैं पैर को हिला सकता हूं। अक्सर, मुझे पैर को बाहरी रूप से कुछ घुमाना पड़ता है, जो इतना बड़ा नहीं है एक सौदा, लेकिन रोबोटिक हाथ किसकी स्थिति के अनुकूल हो सकता है? सरणियों के आधार पर अंतरिक्ष में पैर। और इसलिए आप देखेंगे कि यह कैसे जब हम सर्जरी करते हैं रोबोटिक हाथ को रिसेक्शन के लिए सुलभ बनाने के लिए। यह नहीं जानता कि नरम ऊतक कहां हैं, इसलिए मेरे पास एक है मेरे द्वारा रखे गए रिट्रैक्टर्स की सीमित संख्या, लेकिन आप देखेंगे कि मैं खींच नहीं रहा हूं वापस लेने वालों पर या लाभ उठाना होगा बहुत आक्रामक या एक्सटेंसाइल एक्सपोजर घुटने - बस अनुमति देने के लिए पर्याप्त है ब्लेड को वहां पहुंचते देखा जहां इसे पहुंचने की आवश्यकता है। कभी-कभी एंटेरोलेटरल कोना टिबिया तक पहुंचना मुश्किल है, और थोड़ी देर में, मुझे ऐसा करना होगा रोबोट को उस क्षेत्र को प्राप्त करने के लिए स्थानांतरित करें पेटेलर कण्डरा को खतरे में डालना, लेकिन अन्यथा अधिकांश रिसेक्शन आमतौर पर बहुत चिकनी होते हैं। एक बार जब शोधन पूरा हो जाता है, तो हम करेंगे परीक्षण प्रत्यारोपण स्थान। मैं कुछ समय बिताता हूं के पिछले पहलू को साफ करना घुटने, और मैं एक पश्चवर्ती स्थिर निर्माण करता हूं मेरे अधिकांश घुटनों के लिए, इसलिए हम कुछ नरम ऊतक तैयार करेंगे, और फिर मैं घुटने का परीक्षण करूंगा। एक बार जब हम परीक्षण करते हैं, तो मेरे पास तत्काल होगा रोबोटिक हाथ के साथ प्रतिक्रिया संतुलन कहां है, संरेखण कहां है, और हम कैसा महसूस करते हैं, और फिर कभी-कभी, मुझे एक समायोजन करने की आवश्यकता होगी रिसेक्शन में से एक को रीसेट करने के लिए रोबोटिक हाथ के साथ। अक्सर, मैं नहीं करता, लेकिन हम देखेंगे कि यह कैसे होता है। एक बार ऐसा करने के बाद, फिर रोबोटिक आर्म का काम पूरी हो गई है, तैयारी पूरी हो गई है, और इसलिए बाकी सर्जरी है प्रेस-फिट प्रत्यारोपण को स्वीकार करने के लिए हड्डी तैयार करने के लिए मानक। तैयारी का चरण है लुगोल्स को ड्रिल करने और एक बॉक्स कट बनाने के लिए, और फिर एक कील है टिबिया पर मुक्का मारा। एक बार ऐसा हो जाने के बाद, असली प्रत्यारोपण प्रभावित होते हैं। उनका निर्धारण मूल्यांकन किया जाएगा, और फिर असली पॉलीथीन डाला जाएगा। फिर यह एक है मानक बंद। सभी पिन और रोबोटिक सरणी को स्पष्ट रूप से हटाने की आवश्यकता है सर्जरी के अंत से पहले, और एक मानक पट्टी लागू की जाएगी।
अध्याय 2
धन्यवाद। तो यह एक स्ट्राइकर मालिकाना चीज है। ठीक है, अब हम बड़े एफ टूल लेंगे। चलो देखते हैं। यह सही लग रहा है। अच्छा है, और फिर यह बात जुड़ जाती है। इसमें एक स्लाइडिंग क्लैंप है जो पैर को पकड़ता है। अच्छा। फिर हम इनमें से एक को यहां रखेंगे। कर्टनी पर शिकंजा कसें। बढ़िया, वहां हर कोई, अच्छा है, और फिर हमें बस आपके फुटबॉल को टक्कर देने की आवश्यकता होगी। अच्छा। यह हमारा सेट अप है।
अध्याय 3
ठीक। तैयार - मानक मध्य रेखा चीरा। मेयो कैंची। धन्यवाद। गेल्पी। और एक श्निट। बोवी, कर्टनी को पकड़ो। यह सब मानक है पूर्वकाल दृष्टिकोण। मैं इसे फ्लेक्सन में करता हूं क्योंकि मुझे लगता है कि यह मदद करता है ऊतकों पर थोड़ा तनाव पैदा करें, और इसलिए मुझे बनाने की ज़रूरत नहीं है एक बड़ा फ्लैप - एक बड़े फ्लैप के रूप में कमजोर करें उपचारात्मक और पार्श्व रूप से - ठीक नीचे समाप्ति। मैं एक और गेल्पी ले जाऊंगा। धन्यवाद। मैं एक स्पंज और एक बोनी लूंगा। मैं इन छोटी-छोटी बातों को दूर कर दूँगा। एक और बोनी। बस धीरे से यहां थोड़ा औसत दर्जे का फ्लैप उठाएं। इस रोगी का बीएमआई लगभग 35 है, इसलिए हमें एक बनाना पड़ सकता है सामान्य से थोड़ा अधिक फ्लैप। बहुत अच्छा - थोड़ा यहाँ. ठीक।
तो फिर औसत दर्जे के किनारे पर एक मानक औसत दर्जे का आर्थ्रोटॉमी। हमें थोड़ी अधिक त्वचा लेने की आवश्यकता हो सकती है। हम देखेंगे। ठीक है, मैं अब एक गहरा चाकू ले जाऊंगा, कृपया। धन्यवाद। सक्शन के साथ तैयार हैं? Wooh - बड़ा बहाव! यह स्पष्ट तरल पदार्थ की तरह लग रहा था। मुझे लगता है कि हम थोड़ा और चीरा लगाएंगे। चाकू वापस आ रहा है। क्या मुझे Z, सहयोगी मिल सकता है? तो उसके पास एक वरस घुटना है, जो पार्श्व की तुलना में सख्त होता है। तो मैं आमतौर पर अनुमान लगाऊंगा कि - बंद करके - थोड़ा और उपचारात्मक जारी करना घुटना। यदि आप उसे रख सकते हैं नक्शा नीचे, यह मेरी मदद करेगा। तो हम यहां थोड़ा औसत दर्जे का फ्लैप बनाएंगे। और हम इस पूर्ववर्ती मेडियल मेनिस्कस एक्सिशन को साफ कर देंगे। घुटने के लिए यह मेरे लिए सभी मानक दृष्टिकोण है बदलाव। मैं चरणों में मेनिस्कस को हटा देता हूं। मैं पूर्ववर्ती तीसरा लेता हूं यहां जब मैं इसे देख सकता हूं। फिर हम इस छोटे से ऑस्टियोटोम का उपयोग करेंगे यहां के नीचे थोड़ी जगह बनाने के लिए। वहां उस मध्यवर्ती कोने में थोड़ा सा चूसना, कर्टनी - धन्यवाद। हम बस धीरे से इसे चारों ओर चिढ़ाएंगे। फिर मैं बस इन्हें जारी करूंगा एमसीएल के छोटे गहरे फाइबर। ठीक है - और एक गहरा चाकू। क्षमा करें। तो अब विस्तार में, मैं वसा पैड को पूर्वकाल में जारी करता हूं। आप उस गेल्पी को वहां से बाहर ले जा सकते हैं, कर्टनी। हाँ, आप उस शीर्ष को हटा सकते हैं। और यह पर्याप्त रूप से स्पष्ट हो जाएगा। और फिर हम इसे वापस ले लेंगे। वहां हमारा एक्सपोजर जाता है। और फिर हम Z को वापस ले लेंगे। इसलिए मैं सुप्रापेटेलर सिनोवियम की एक छोटी मात्रा को साफ करता हूं। एक 3 की तरह दिखता है। हम एक गहरा चाकू लेंगे, सहयोगी। धन्यवाद। और हम इस छोटे से इन्फ्रापेटलर वसा पैड को साफ करेंगे। एन मैरी, क्या आप टूर्निकेट को 300 तक रख सकते हैं? वह सिर्फ थोड़ा उच्च रक्तचाप से ग्रस्त है, और यह पकड़ नहीं रहा है। यदि आपका दबाव वापस आ जाता है, तो मुझे बताएं, और फिर मैं टूर्निकेट को वापस नीचे ले जाऊंगा। और हम यहां से कुछ झटका खा रहे हैं। अब एसीएल यहां है।
आप इसे देख सकते हैं, इसलिए दुर्भाग्य से इसका कोई फायदा नहीं है वर्तमान में कुल घुटने में हमारे लिए। इसलिए मैं एसीएल का बचाव करने जा रहा हूं। पटेला का पहला, सहयोगी, इसलिए हम आगे ऐसा करेंगे। तो आप देख सकते हैं, उसे ट्राइकम्पार्टमेंटल गठिया है। यहां कोई कार्टिलेज नहीं बचा है। वह है पेटेला पर नहीं, और तो - और यहां एक बड़ा औसत दर्जे का ओस्टियोफाइट है। इसलिए– और एक बड़ा टिबियल ओस्टियोफाइट है, लेकिन इसके हिस्से के रूप में दृष्टिकोण, आप उन्हें हटाना नहीं चाहते हैं, क्योंकि हमें पंजीकरण बिंदुओं के रूप में उनकी आवश्यकता है रोबोटिक हाथ के लिए - और इसलिए यह सामान्य से अलग है।
अध्याय 4
तो अब मैं अगली बार पटेला करने जा रहा हूं। कृपया, दो ट्रिपल हुक। धन्यवाद। हम पटेला करते हैं, क्योंकि यह एक होने जा रहा है - यह होगा फीमर और टिबिया के लिए एक प्रेस-फिट घुटने, लेकिन मैं - बोनी, कृपया - मैंने प्रेस-फिट पटेला तकनीक को नहीं अपनाया है, इसलिए मुझे अभी भी पटेला को सीमेंट करना पसंद है। बस इस सुप्रापेटेलर सिनोवियम का थोड़ा सा हिस्सा यहां निकालें। ठीक। 22 मिमी मोटी, तो पेटेला 9 या 10 मिमी हैं। मैं जा रहा हूँ मेरे बाईं ओर कदम यहाँ। चलो चौड़ी ब्लेड देखते हैं, कृपया। तो हम करेंगे 12 मिमी मोटाई अवशिष्ट के लिए शूट करें। यह अभी भी मेरे हाथ में एक फ्रीहैंड कट है। बुरा नहीं है - चलो देखते हैं कि मैंने कैसे किया। मुझे थोड़ा मोटा लगता है, फिर भी। हाँ, एक और मिलीमीटर की जरूरत है। 32 मैं शर्त लगाता हूँ। यह बेहतर लगता है। हाँ ठीक है। आप अचार का कांटा बाहर निकाल सकते हैं। तो यहां एक 32 मिमी पेटेला है। यह उसकी हड्डी से मेल खाने के लिए सही लग रहा है। ठीक। आगे बढ़ो, कर्टनी - उन्हें ड्रिल करें। अच्छा। अच्छा। चलो बटन देखते हैं। इसलिए हम लगभग 23 या 24 मिमी मोटी शूटिंग कर रहे थे। जो 24 पर सही है, इसलिए यह बहुत अच्छा लग रहा है। यहन।।। बहुत-बहुत धन्यवाद। कृपया, क्या मैं रोंगेर को देख सकता हूँ? हम बस इस बढ़त को साफ कर देंगे। जेस, आप मुझे एक 32 पेटेलर बटन दिखा सकते हैं। शानदार। आप सीमेंट के एक बैग के साथ इसे खोल सकते हैं। क्या मुझे मिश्रण शुरू करना चाहिए या ... हाँ, एक बार बटन खुलने के बाद, और आपके पास सही क्लैंप तैयार है। इसके अलावा, हमें रोबोटिक आर्म के लिए अब पिन की आवश्यकता होगी, इसलिए आपको करना होगा एक साथ दो काम करें। यहाँ तुम जाओ, कर्टनी – यदि आप ऐसा कर सकते हैं - ड्रिल और आस्तीन पर लंबा पिन।
अध्याय 5
तो आगे हम इसे डालने जा रहे हैं – यहाँ तुम जाओ, कर्टनी. इसके बाद, हम ड्रिल पिन में डालने जा रहे हैं रोबोटिक हाथ के लिए, जो उनमें से एक है सरणी पिन. चलो लंबी आस्तीन देखते हैं। मैं इन्हें चीरा के भीतर डाल रहा हूं, और इसलिए इसे जाना होगा – इसे ट्रोचलेया के समीप ही जाना होगा। आप एक सेकंड में देख पाएंगे कि यह कहां है। चलो देखते हैं। आइए सुनिश्चित करें कि यह अच्छा है। एक और। बिलकुल ठीक। और फिर यह फीमर के लिए सरणियों में से एक है। क्या आपके पास नीले स्क्रूड्राइवर हैं? इसलिए मैंने इसे अस्थायी रूप से यहां रखा ताकि इसे जगह पर रखा जा सके, और फिर हम घुटने ऊपर उठा देंगे। वहाँ चूसो, कर्टनी। हाँ। बहुत अच्छा - हमारा क्वाड टेंडन ठीक है। इसलिए हमें थोड़ा मल्टीटास्क करना होगा, क्योंकि हम पिन पर काम कर रहे हैं और एक ही समय में सीमेंटिंग पर। हाँ। यहां, हम इसे बदल देंगे।
ठीक है, अब टिबियल पिन देखते हैं। तो ये दो टिबियल पिन इंट्रा-आर्टिकुलर रूप से जाते हैं, यहाँ नीचे, टिबियल ट्यूबरकल के नीचे, और मैं उन्हें थोड़ा ऊपर की ओर घुमाता हूं। और फिर आस्तीन।
तो यह सरणी के लिए कैसा दिखता है टिबिया, जो है - यह वास्तव में, तकनीकी रूप से, श्रोणि सरणी है। और फिर हम इसे यहां सेट करेंगे। उफ़ - मुझे इसे थोड़ा कोण करने की आवश्यकता है। हम वहाँ चलें। यह सब ठीक होना चाहिए। तो मैं इसके कोण की जांच करता हूं क्योंकि रोबोट सरणी को होना चाहिए इन चीजों को देखने में सक्षम। तो यह यहां सेट हो जाएगा। यह वास्तव में हिप सरणी का उपयोग कर रहा है। हम नहीं करते चाहता हूं कि यह उसकी त्वचा को वहां मार दे, इसलिए मैं यह सुनिश्चित करने के लिए सावधान हूं कि यह है बस करीब - इसलिए यह बहुत अच्छा लग रहा है। चलो अब ऊरु सरणी देखते हैं। आप इसे मुझे दे सकते हैं, कर्टनी।
इसलिए यह दूसरा है, जिसे हम यहां सेट करेंगे। यह वास्तव में मुझे बहुत ठीक लग रहा है। हम देखेंगे। हम इस आदमी को वहां ठीक से पेंच करने के लिए कहते हैं। तो अब रोबोटिक आर्म देता है डिस्प्ले जहां इन चीजों को इसके द्वारा देखा जाता है।
ठीक है, मैलेट। ठीक है, आगे बढ़ो। इसे 2 और दें। तुम वहाँ जाओ। यह ऊरु चेकपॉइंट है, और फिर यह टिबियल चेकपॉइंट है। ये– यदि आप इसे प्राप्त नहीं कर सकते हैं, तो मैं इसे ले जाऊंगा। ये छोटी-छोटी बातें हमें इसके लिए मान्य बिंदु देती हैं – पूरे मामले में रोबोट हाथ के लिए। ठीक है, आगे बढ़ो, कर्टनी। हाँ, चलते रहो। अधिक - अच्छा। ठीक है, तो यह अच्छा है। मुझे बस वह नीला स्क्रूड्राइवर लेने दें, छोटा, फिर से। मैं बस यह सुनिश्चित करना चाहता हूं। आप कुछ भी हिलना नहीं चाहते हैं।
अध्याय 6
ठीक है, हमारा पेटेला तैयार है। चलो सीमेंट देखते हैं, कृपया, और क्या आपके पास है गीला लैप स्पंज? मैं इसके लिए उच्च चिपचिपाहट सीमेंट का उपयोग करता हूं, क्योंकि यह हमें यह करने की अनुमति देता है सीमेंट जल्दी तैयार, और मैं अब मामले का ठोस हिस्सा करता हूं क्योंकि जब तक हम बाकी की तैयारी कर रहे हैं, यह कठोर हो जाएगा और सर्जिकल समय को कम करें - बस एक छोटी सी चाल. ठीक है, हम क्लैंप लेंगे। धन्यवाद। तो हम बस इसे थोड़ा सा देंगे प्रारंभिक निचोड़। हम देखेंगे। सीमेंट उतार ें। क्लैंप को वापस चालू करें। सुनिश्चित करें कि कोई त्वचा फंसी नहीं है। आपके पास एक श्निट है? धन्यवाद। तो मैं उस छोटे लड़के, कर्टनी को चूसने जा रहा हूं। ठीक है, एक और वहीं - छोटा। हाँ, अच्छा - ठीक है। आपको यहाँ से जाना है।
अध्याय 7
ठीक है, बहुत अच्छा. अब - अब हमें अपना सेट करने की आवश्यकता है पंजीकरण, इसलिए मैं फिर से अपने बाईं ओर कदम रखने जा रहा हूं। ठीक है, तो सबसे पहले गति का हिप सेंटर है। तो आगे बढ़ो - कोई नृत्य नहीं आज दोस्तों. इसलिए, हम कभी-कभी इस भाग के दौरान थोड़ा नृत्य करते हैं, लेकिन - लेकिन विचार आंतरिक-बाह्य रूप से घूमने के लिए फ्लेक्स और विस्तार करना है, अपहरण, जोड़, और फिर यह सिर को केंद्र में रखेगा। और फिर हमें यह बताने की जरूरत है कि कहां – जो हमें हमारे यांत्रिक अक्ष के लिए समीपस्थ बिंदु देता है। और फिर डिस्टल पॉइंट हमारा टखना है, इसलिए यह औसत दर्जे का मॉलोलस है। और फिर पार्श्व मॉलियोलस - यह थोड़ा व्यक्तिपरक है, लेकिन मुझे लगता है कि कुछ त्रुटि खुद को रद्द कर देती है। ठीक है, जेस, यह अच्छा है। और फिर हमें यह बताने की जरूरत है कि कहां मामले में बाद के लिए ऊरु चेकपॉइंट यहां है, इसलिए आगे बढ़ें। बहुत अच्छा - और फिर यहां टिबियल चेकपॉइंट है। अच्छा है, और फिर - तो अब यह हड्डी का पंजीकरण हिस्सा है रोबोटिक सर्जरी के लिए। इसलिए मैंने पहले ही अधिकांश एक्सपोजर कर लिया है। यह दिखता है बहुत सारे अंक पसंद हैं, लेकिन यह वास्तव में बहुत तेज है। तो मैं बस इसके साथ हड्डी को छूना चाहते हैं, और मैं सिर्फ पैटर्न का बारीकी से पालन कर रहा हूं लेकिन बिल्कुल नहीं, क्योंकि विचार है इसे कई आयामों में कई बिंदुओं के रूप में देने के लिए। जेस, क्या आप मिटा देंगे? वह एक? वह हड्डी में घुस गया। क्षमा करें - हाँ, बस। धन्यवाद। ताकि गलती से हड्डी में पंक्चर हो जाए। मुझे लगा कि यह सबकॉन्ड्रल हड्डी के माध्यम से जाता है, और यह एक बिंदु के लिए अच्छा नहीं होगा क्योंकि सीटी स्कैन है हड्डी पर ही आधारित है न कि आर्टिकुलर कार्टिलेज पर। तो उपचारात्मक पर यहां घुटने के किनारे, जहां यह सब नीचे की ओर है हड्डी, ये बिंदु महान हैं, क्योंकि वे नहीं करेंगे - मुझे चिंता करने की जरूरत नहीं है कि मैंने किसी भी चीज़ से पंचर कर दिया है या रोबोटिक आर्म को बताया कि मैं उससे भी गहरा हूं मैं वास्तव में हूं - कि हड्डी वास्तव में उससे कहीं अधिक गहरी है जितना कि यह वास्तव में है वास्तविकता। इसलिए मैं यहां अपने तरीके से काम कर रहा हूं। मैं हूँ - आप कह सकते हैं कि मैं सही नहीं हूं उन्हें ठीक उसी जगह रखने के संदर्भ में जहां बात कहती है, लेकिन यह सिर्फ है यह सुनिश्चित करने की कोशिश कर रहा हूं कि मुझे एक व्यापक गा मिले - पंजीकरण करने के लिए शरीर रचना विज्ञान का स्पेक्ट्रम - और ये ओस्टियोफाइट्स हैं यहां मैंने उड़ान नहीं भरी, लेकिन इसे हटाना महत्वपूर्ण है वे बाद में क्योंकि वे प्रभावित करने जा रहे हैं घुटने का अंतर संतुलन – लेकिन शुरुआत में आप उन्हें बाहर नहीं निकाल सकते। और फिर सिर्फ चार और यहां पायदान पर, और फिर हम देखेंगे कि मैंने कितना अच्छा काम किया है। वहां - तो चलो देखते हैं। इसलिए हम हरे और पीले रंग की तलाश कर रहे हैं। यह बहुत अच्छा है, इसलिए उनमें से अधिकांश - वे बिंदु सही हैं जहां रोबोट हाथ ने इसकी योजना बनाई थी। तो यह उपास्थि है। यह लगभग एक मिलीमीटर मोटा है, और अगर मैं नीचे धकेलता हूं, तो मैं हूं ठीक हड्डी पर। तो यह अच्छा है। तो, यह एक सत्यापन जांच है। यह हड्डी पर सही है, इसलिए यह 1/2 - 1/10 के भीतर अच्छा है । एक मिलीमीटर का दसवां हिस्सा। यह एक औसत दर्जे के ओस्टियोफाइट पर सही है। यह एक है यहां हड्डी के ठीक कोने में। यहन एक बेहतर, पूर्ववर्ती फीमर एक मिलीमीटर के भीतर। आप सीटी पर देख सकते हैं कि यह कैसे चलता है छोटा बॉक्स जैसे ही मैं हड्डी के साथ स्लाइड करता हूं, इसलिए। और आखिरी एक में है यहां की नॉच, जो ठीक उस औसत दर्जे की दीवार पर है – या मध्यवर्ती पक्ष पर पार्श्व दीवार पर, और यह फीमर के लिए है। अब हम टिबिया को थोड़ा आगे लाने जा रहे हैं, और मैं उस जीआर - ब्लू प्रोब को फिर से वापस ले जाऊंगा। अब टिबिया के लिए एक ही सटीक बात है। हम यहां कई अंक हासिल करने जा रहे हैं - और फिर एक ही बात। वह है यहां हड्डी पर हड्डी, इसलिए यह सामान अच्छा है - पंजीकरण के लिए अच्छा है क्योंकि यह सही है कहाँ की उप-शंकुधारी हड्डी सीटी स्कैन है। फिर हम यहां थोड़ा सा सामने आएंगे। तो वर्तमान में यह एक्सपोजर शायद थोड़ा अधिक समीपस्थ रूप से नहीं है मैं जितना करूँगा पिन के उस समीपस्थ जोड़े के लिए अनुमति देने के लिए सामान्य रूप से किया है - क्वाड को चीरे बिना वापस पकड़ना। और फिर यहां नीचे। इसलिए मैंने यहां कोई ओस्टियोफाइट्स नहीं निकाला या तो, और हमारे पास यहां मोर्चे पर कुछ और हैं। वहां हमेशा नरम हड्डी होती है, इसलिए मुझे वास्तव में सावधान रहना होगा। कण्डरा के माध्यम से जाओ लेकिन हड्डी के माध्यम से नहीं - और फिर यहां टिबियल ट्यूबरकल से नीचे। एक जोड़े को सीधे ऊपर जाने दें। यह पेटेलर कण्डरा के माध्यम से सही है, और अंतिम सेट यहीं है उपचारात्मक टिबिया। चलो देखते हैं कि हमने कैसे किया। बहुत अच्छा - सभी साग और पीले। फिर से, एक लाल - मैंने अंदर प्रवेश किया यहां सामने वाला, लेकिन यह अभी भी हड्डी पर बहुत सटीकता के भीतर है। तो मैं रहूंगा - मुझे उस एक बिंदु को फिर से करने की आवश्यकता नहीं है। फिर पूर्वकाल में, टिबिया पर – उफ़। क्षमा करें, जांच बेकार हो गई। हम वहाँ चलें। और फिर मैं यह सुनिश्चित करने के लिए हमेशा सावधान रहता हूं कि जांच इस ओर इशारा कर रही है ट्रैकिंग स्क्रीन - उफ़। मेरा एक पिन ठीक वहीं है जहां वह होना चाहता है। हम वहाँ चलें। उन पिनों में से एक वहीं है – और फिर एक और उपचारात्मक रूप से। वहीं - अच्छा। यह हमारे पंजीकरण के लिए है। इसमें लगभग 3 या 4 मिनट लगे।
अध्याय 8
अब, मैं आखिरकार इन सभी ओस्टियोफाइट्स को यहां से बाहर निकाल सकता हूं। तो रोंगेउर, कृपया। अब समझ में आया। इसलिए, अब इन सभी ओस्टियोफाइट्स को हटाना महत्वपूर्ण है, भले ही उसके घुटने में वे बहुत बड़े नहीं हैं, इसलिए यह एक बड़ी बात नहीं है। यहाँ थोड़ा सा पार्श्व - बहुत बुरा नहीं है। और फिर इस टिबियल से हमें छुटकारा पाना होगा। इसलिए हम इसे थोड़ा और साफ करने की कोशिश करेंगे। चलो देखते हैं कि 3/8 घुमावदार और एक मैलेट। इसलिए, यह एक महत्वपूर्ण है। एमसीएल यहीं है, और ओस्टियोफाइट बस इसके नीचे है। इसलिए, मैं इस बात को सावधानीपूर्वक हटाने जा रहा हूं। स्पष्ट करें कि वहां से औसत दर्जे का ओस्टियोफाइट। अच्छा - मुझे लगता है कि यह बहुत अच्छा लग रहा है।
अध्याय 9
ठीक है, इसलिए अब हमें एहसास होगा कि हमारा घुटना कैसा दिखता है। अपने दाईं ओर कदम, कर्टनी, लेकिन अगर आपको बुरा न लगे तो अपनी आंखें घुटने पर रखें। ठीक है, इसलिए इस घुटने का लगभग पूर्ण विस्तार है। कभी-कभी उनके पास एक फ्लेक्सन अनुबंध। हम वास्तव में इसके बारे में थोड़ा सा खेल है, लेकिन 1 डिग्री - यह 4 डिग्री वारस में है - तटस्थ पर 4 या 5 डिग्री, और मैं कर सकता हूं इसे लगभग 10 डिग्री वारस तक धकेलें। तो वह - वह - इसलिए उसने कुछ पार्श्व शिथिलता। यह देखें? अब देखते हैं कि क्या होता है। तो, मैं कर सकता हूँ उसे वास्तव में कुछ वाल्गस में भी धकेल दें। क्या आपके पास छोटे लॉलीपॉप हैं? इसलिए काफी अनुवाद है आप यहां घुटने में देख सकते हैं, जो मैं इसे ढीला घुटना कहूंगा। और वह 16 बजे बैठा है या - जाओ आगे बढ़ो और उस एक को पकड़ो, जेस, सिर्फ मज़े के लिए। इसलिए, हमारा विस्तार अंतर क्या है? पार्श्व की तुलना में थोड़ा ढीला या औसत दर्जे का। अब देखते हैं कि 3, 4 चम्मच, क्योंकि मैंने पार्श्व दोष को भरने के लिए इसे चुना। तो मैं - आराम से वह 16 साल की है, पार्श्व रूप से 17 मिमी, लेकिन मैं इसे इस बारे में आगे बढ़ा सकता हूं - वास्तव में, इतना नहीं - जितना मैंने सोचा था उससे कम होने जा रहा है. तो, मैं इनमें से एक चम्मच वहां डालने जा रहा हूं इस पार्श्व पक्ष को खोलने की कोशिश करें। देखें कि कितना - देखें कि यह इसे आगे बढ़ाता है 20 तक। यह इस बारे में है कि यह मेरे लिए कैसा महसूस हुआ। तो, अब मुझे मिल गया है एक अधिकतम प्रसार पार्श्व रूप से और फिर उपचारात्मक रूप से जैसे ही मैं इसे खींचता हूं। इस जैसा इसे वहीं पकड़ो, जेस। उस एक को पकड़ो। तो, यह उसके अंतराल के लिए अधिक सटीक है। उसके पास थोड़ा ढीला घुटना है, इसलिए जब मैंने ऐसा किया हाथ में, हम केवल 16 या 17 प्राप्त कर रहे थे, लेकिन हम वास्तव में 19, 20 रेंज में हैं, जो मेरे लिए ठीक है। यह विस्तार पर थोड़ा ढीला है। तो अब कोई भी समायोजन करने से पहले हम देखेंगे कि फ्लेक्सन में क्या है। तो मुझे करना है यहां घुटने को 90 डिग्री फ्लेक्सन पर सेट करें। थोड़ा सा - 89, 90। काला ओस्टियोटोम। तो एक ही बात - यह बहुत तंग दिखता है पार्श्व की तुलना में औसत दर्जे का, और - इसलिए अब हमें यह देखना होगा कि हम क्या करने जा रहे हैं यहां पार्श्व रूप से करने में सक्षम हो। इसलिए, पार्श्व अंतराल 20 पर बैठा है, और मैं इसे 21 तक धकेल सकता हूं। और उपचारात्मक - मैं इसे लगभग 16 तक धकेल सकता हूं। उस एक को बचाओ। इसलिए, हम पार्श्व से अधिक तंग हैं, इसलिए इसे ठीक करने के लिए - लेकिन हमारा अंतराल इतनी दूर नहीं हैं, इसलिए यदि हम इसे केंद्र में पिन करते हैं, क्योंकि हमें बाहरी रूप से आवश्यकता होगी अब फीमर को ठीक करने के लिए घुमाएं फ्लेक्सन गैप विषमता। तो आगे बढ़ो और बाहरी रूप से इसे घुमाओ, और एक और करो, जेस। एक और करो। हम वहाँ चलें। अब, चलो देखते हैं कि मैं क्या हासिल कर सकता हूं इस बात के बारे में। तो यह इसके बारे में है - अभी भी बहुत बदलाव नहीं है, है ना? हमें देखना होगा चाहे मुझे कुछ रिहाई मिले। उस एक को बचाओ, जेस। तो हम बैठे हैं - मैं वहां थोड़ा बेहतर हो गया, लेकिन मैं इससे आश्चर्यचकित हूं। और मैं अभी भी कर सकता हूँ जैक इसे खुला है, इसलिए हम अभी भी थोड़ा खुले हैं - की तुलना में थोड़ा तंग औसत दर्जे का पार्श्विक। अब, मुझे यह तय करना है कि मैं स्वीकार करना चाहता हूं या नहीं यह 2 मिमी का अंतर है या नहीं। उसके पास काफी अनुवाद है, मैं हूं - इसलिए मैं एक हूं थोड़ा संकोच है। देखिए, मैं उसे 19 साल का कर सकता हूं। मुझे थोड़ा संकोच हो रहा है औसत दर्जे को छोड़ दें। चलो बस यह करते हैं। पिन - टिबिया को पार्श्व रूप से पिन करें, और फिर इसे टिबिया पर एक डिग्री अधिक वरस दें - हाँ। तो यह होना चाहिए अब उसे बहुत करीब लाओ। हम भीतर हैं - हाँ, हम मूल रूप से विस्तार में भी हैं और फ्लेक्सन में 1 या 2 मिमी सख्त। और अब हम भी थोड़ा सा हैं बड़ा, इसलिए - इसलिए मैंने किया है हमारे विस्तार और फ्लेक्सन अंतराल बहुत अच्छे से मेल खाते हैं, लेकिन मैं लगता है कि हम फीमर 1 को दूर करना चाहते हैं। वहां - यह उसे 19 साल का बनाता है। और अब हमें फैसला करना है। उसका घुटना थोड़ा ढीला है। मैं आमतौर पर 18 मिमी अंतराल के लिए शूट करें, लेकिन सवाल यह है - इसे एक टिक पर रखो, जेस। मैं देखता हूँ कि तुम क्या हो उसके बाद। तो यह - यह अच्छा है क्योंकि 18 सिर्फ एक के लिए सही है 9 मिमी पॉली, और उसके सिस्टम में थोड़ी शिथिलता है यहां - इसलिए मुझे लगता है कि हम इसके साथ जाएंगे। अन्यथा, हमें एक की आवश्यकता होगी 10 या 11। तो, यह मेरे लिए बहुत अच्छा लग रहा है। मैं उस छोटे को स्वीकार कर रहा हूँ थोड़ा सा पोस्टरोलेटरल शिथिलता, जो मेरे लिए बायोमेकेनिकल रूप से ठीक है। कुछ लोग करेंगे कहते हैं कि यह वास्तव में ठीक है। मैं बहुत कुछ करूँगा - मैं इसे किसी भी दिन स्वीकार करूंगा। तो, आइए हमारे रिसेक्शन की जांच करें और सुनिश्चित करें कि वे ठीक दिखते हैं। तो, यह बहुत तेज था। यह है बहुत सारे समायोजन सापेक्ष, तो क्या करें हमारे पास है? हमारे पास है– हम केवल 6-मिमी डिस्टल रिसेक्शन ले रहे हैं, जो है वास्तव में मैं आमतौर पर क्या कहता हूं, और हम 8.5 पोस्टरोमेडियल ले रहे हैं। तो हम हैं - हम थोड़ा बड़ा फ्लेक्सन गैप बना रहे हैं, और हम हैं - पर क्लिक करें पश्चवर्ती कोंडिलर एक्सेस लाइन. - हाँ। तो हम हैं - यह दिलचस्प है, क्योंकि हमारा पीसीए वास्तव में समानांतर है लगभग हमारे ट्रांसएपिकॉन्डिलर के लिए इस पर धुरी, जो थोड़ा असामान्य है। आमतौर पर, वह उपचारात्मक पक्ष अधिक होता है इस से अधिक हाइपरप्लास्टिक। यह एक बॉक्सी, सममित फीमर से अधिक है। तो मुझे लगता है – हम हमेशा अधिक डिस्टल फीमर ले सकते हैं, इसलिए मैं थोड़ा सा होना पसंद करूंगा ढीले की तुलना में विस्तार में तंग। और उसके पास फ्लेक्सन कॉन्ट्रैक्टर नहीं था, इसलिए मुझे लगता है कि हम इसे छोड़ देंगे - और अगर घुटने के साथ बाहर आता है फ्लेक्सन कॉन्ट्रैक्टर, हमें कुछ डिस्टल फीमर को फिर से निकालना होगा, लेकिन मुझे लगता है कि हम इसमें हैं इसके साथ अच्छा आकार। इम्प्लांट को एक सेकंड के लिए बंद कर दें। हां, मुझे लगता है कि रिसेक्शन खुद ठीक दिखते हैं। मुझे लगता है - मुझे कोई ओवर-रिसेक्शन नहीं दिख रहा है। हम टिबिया पर 4 मिमी और 7.5 ले रहे हैं, जो थोड़ा रूढ़िवादी शोधन भी है, लेकिन मैं एक और मिलीमीटर लेना पसंद करूंगा अगर हम तंग हैं तो कुछ जोड़ें यदि हम ढीले हैं। और वह पोस्टरोमेडियल फाइट मैंने अभी तक नहीं हटाया है, इसलिए यह ढीला हो जाएगा। ठीक है, आप जा सकते हैं दूसरी स्क्रीन पर लौटें। मुझे लगता है कि यह हमें थोड़ा ढीला कर देगा, जो अच्छा है, और मुझे वास्तव में उस पोस्टरोलेटरल की उतनी परवाह नहीं है, मुझे लगता है कि कुछ सममित है – यहां बहुत सारे अनुवाद हैं और बहुत सारे गैपिंग हैं। तो, मैं नहीं करता ढीला होना चाहते हैं, या हम एक बड़ा प्लास्टिक डाल देंगे। ठीक है, यह है अच्छा।
अध्याय 10
चलो रोबोटिक हाथ को अंदर लाते हैं। सीमेंट कठोर है? हाँ। पूर्ण। ठीक है, चलो देखते हैं। मुझे पकड़ने की जरूरत है हैंडल यहाँ. आप मुझे जाने दे सकते हैं। यह अच्छा है। तो, हम करते थे इस चीज़ को स्थापित करने के बारे में वास्तव में गुदा बनें, लेकिन अब मैंने सीख लिया है बस आंख की पुतली की तरह और हाथ की स्थिति सुनिश्चित करें – यह अच्छा है, जेस। वहीं रुक जाओ। चलो बस सुनिश्चित करें कि मैं टिबिया तक पहुंच सकता हूं। यह सुंदर लग रहा है अच्छा है, और यह बहुत अच्छा लग रहा है। मुझे लगता है कि हम व्यवसाय में हैं। इसमें से कुछ है इसके साथ करना - हाँ, आगे बढ़ो। इनमें से कुछ हम वास्तव में बहुत हुआ करते थे इसके बारे में सावधान रहें, और उनके पास वास्तव में है - ग्रीन प्रोब - उनके पास वास्तव में एक कार्यक्रम है आपको यह जानने में मदद करने के लिए कि अंतरिक्ष में यह आधार कहां है लेकिन – क्योंकि मैं पैर को चारों ओर घुमा सकता हूं, मैं आमतौर पर इससे बाहर निकल सकता हूं। इसलिए, अब हमें बस यह सत्यापित करना होगा कि हमारी जांच चौकी आगे नहीं बढ़ी है। ऐसा नहीं है। हमें करना ही होगा आरा ब्लेड को मान्य करें जहां रोबोट सोचता है कि यह होना चाहिए, जो उम्मीद है कि यह चिह्नित करेगा। कभी-कभी इसमें एक सेकंड लगता है। वह रहा।
ठीक है, तो अब रोबोट हाथ जानता है कि शोधन कहां है होना चाहिए। ऐसा लगता है एक अपेक्षाकृत रूढ़िवादी लकीर, लेकिन मैं हूं - हम हैं इससे आश्चर्य नहीं हुआ। और इसलिए मैं हूँ इसे मैदान के करीब लाने जा रहे हैं। यह संलग्न है, और फिर मैं ट्रिगर को बहुत धीरे से खींचें – और रोबोटिक हाथ किसके विमान को बनाने के लिए आगे बढ़ेगा? वह लकीर जो हम चाहते थे। अब हम जीवित हैं। हम रोल करने के लिए तैयार हैं। इसलिए– इसलिए ट्रिगर काम करेगा। इसलिए, मैं अपनी आँखें आगे-पीछे करता हूं – रोबोटिक हाथ और स्क्रीन, और वह बाधा जो हरी है, वहां एक आभासी बाधा है जो मुझे नरम ऊतकों में जाने से बचाता है। और इसलिए मैं बस कोशिश कर रहा हूँ हड्डी के अंत से हरे रंग को हटा दें, जो कि शोधन है। उसकी हड्डी वास्तव में बहुत कठोर है, तो यही वह जगह है जहां हमें वह छोटी सी घबराहट हो रही है स्टार्ट-एंड-स्टॉप सामान। इसलिए यहां बहुत रूढ़िवादी पूर्ववर्ती शोधन। हम देखेंगे। हमें दो लेनी पड़ सकती हैं डिस्टल फीमर से अधिक, यह इस बात पर निर्भर करता है कि उसका घुटना बाद में कैसे संतुलित होता है, लेकिन मैंने ऐसा जानबूझकर किया - इसलिए हम देखेंगे कि हम कहां समाप्त होते हैं। मुझे जाने दो - बस इसे वहीं छोड़ दो, जेस। मैं सिर्फ एक और बार क्रीज पर उतरना चाहता हूं। इसलिए, हम रोबोटिक हाथ को फिर से संरेखित करने देंगे। अच्छा। बस प्रेस-फिटिंग के साथ सुनिश्चित करना चाहते हैं, हमारे पास एक बहुत, बहुत सटीक है श्निट, कृपया - एक बहुत ही सटीक डिस्टल रिसेक्शन।
ठीक है, आप बदल सकते हैं अब पश्चवर्ती लकीर। इसलिए, अब पीछे की लकीर होगी। यह ब्लेड साइड काटने की क्षमता भी है, इसलिए कभी-कभी यह हड्डी के साथ भरा हो जाता है। इसलिए - इसलिए अब हम अपने पश्चवर्ती लकीर के लिए सेट करने जा रहे हैं, इसलिए हम करेंगे इसे करीब लाओ। ठीक है, रोबोट चाहता है कि मैं बाहरी रूप से थोड़ा घूमूं थोड़ा, इसलिए उस पर लटक जाओ। आप समझ गए, कर्टनी? उम्मीद है, यह ऐसा करेगा। चलो देखते हैं। हाँ। तो यह इसे विमान में ले जाता है। उम्मीद है, यह खुश होगा। यह करीब है, लेकिन काफी नहीं। हमें आवश्यकता हो सकती है ... हाँ अच्छा है। यह दिलचस्प है. इस चीज के साथ आपका हाथ नरम होना चाहिए, और जब मैं इसे थोड़ा सा मांसपेशी करता हूं, यह मुझसे लड़ता है। मैं बस घुटने को थोड़ा और फ्लेक्स करने जा रहा हूं। मुझे लगता है कि हम यहां थोड़ा बेहतर कोण की जरूरत है। चलो फिर से कोशिश करते हैं। हम वहाँ चलें। ठीक है, यह कर देगा। इसलिए वे पीछे के रिसेक्शन हैं। तो, हम जा रहे हैं दूसरे आरा ब्लेड पर स्विच करें, जो सीधे आगे है। हम इसे वापस ले लेंगे। टिबियल ट्रैकर नहीं देखा जा रहा था। यह ऑन-एंड-ऑफ की तरह था - ऑन-एंड-ऑफ और इसलिए ... हाँ, किसी भी कारण से, यह बस उस छोटे से साथ खुश नहीं था। मैलेट, कृपया - बस इस पीछे की हड्डी का एक छोटा सा हिस्सा साफ करने जा रहा है। इनमें से एक के लिए उसकी हड्डी की गुणवत्ता ठीक है। तो, अब हम इस पर स्विच कर रहे हैं सीधे आगे ब्लेड देखा। हमें फिर से बाहरी रूप से घूमना होगा, मुझे यकीन है, उस पूर्ववर्ती लकीर को प्राप्त करने के लिए। यह अच्छा लग रहा है. वह ठीक है। मुझे लगता है कि हम यहां अच्छी स्थिति में हैं। तो, अब हम जा रहे हैं इस चीज के अंत में एक नया आरा ब्लेड डालो, और फिर हमें स्थिति को फिर से मान्य करने की आवश्यकता है। मुझे लगता है कि हम ठीक हो जाएंगे। मैं कर सकता हूँ इसे थोड़ा और फ्लेक्स करें। चलो हरे रंग की जांच देखते हैं। इसलिए, हमने यहां हमारे ऊरु चेकपॉइंट को मान्य करने के लिए, और फिर हम देखी गई स्थिति को मान्य करेंगे। वह रहा।
इसलिए, अब हम अपना पूर्ववर्ती शोधन निर्धारित करेंगे। चलो देखते हैं। यह हो सकता है या इसे ट्रिगर करने में सक्षम नहीं हो सकता है। नहीं, हमें पैर को बाहरी रूप से घुमाने की आवश्यकता है थोड़ा और। आपको यह मिल गया, कर्टनी? हाँ। ठीक है, इसलिए अब हम देखेंगे - इसे पंक्तिबद्ध करें। ठीक है, यह पूर्वकाल शोधन है। अब हम पीछे की ओर स्विच करेंगे - बस वहीं रहें जहां आप हैं, कर्टनी, अगर आपको कोई आपत्ति नहीं है।
मैं बस यहां सक्शन लेने जा रहा हूं। अब पीछे की लकीर - बस यहां एक हाथ रखो। अच्छा। यदि आपने पहले लाल निशान देखे हैं, तो यह महत्वपूर्ण नहीं है। यह सिर्फ आधा है एक मिलीमीटर से एक मिलीमीटर ओवर-रिसेक्शन, इसलिए। ठीक है, यह इसके बारे में है - बस है पेटेलर कण्डरा को देखने के लिए।
रोबोट को नहीं पता कि पेटेलर टेंडन कहां है, और फिर अंतिम एक पूर्ववर्ती शोधन है। तो, चलो देखते हैं। यह ठीक लग रहा है. शुक्र है, मेरी सरणी पकड़ रही है। ठीक है, बहुत अच्छा - रिहाई। तो - तो यह फीमर के लिए अलग करने के लिए है।
कोई कटिंग ब्लॉक नहीं, कोई पिन छेद नहीं – इसने सिर्फ हमारी योजना को लागू किया। अब उनमें से कुछ लकीरें थोड़ी हैं मेरे लिए थोड़ा असामान्य है क्योंकि वह डिस्टल रिसेक्शन बहुत कम है। और हम जानते हैं कि हम स्पष्ट रूप से पायदान पर नहीं जा रहे हैं, तो यह एक अच्छा बना दिया वहां पूर्वकाल चैम्फर रिसेक्शन और एक अच्छा पूर्वकाल खुद को अलग करना। हमें कोई शर्त लगाने की जरूरत नहीं है। केंद्रीय हड्डी प्लग इन करें क्योंकि कोई इंट्रामेडुलरी गाइड नहीं है। चलो एक मैलेट देखते हैं, कृपया। वास्तव में, हम इसे यहां वापस ले जा सकते हैं। उस पीछे के हिस्से को साफ़ करें। हाँ - क्या आप इसे पकड़ना चाहते हैं? ग़जब का। और हम इसे पकड़ लेंगे, और फिर हम एक 3 फीमर सीआर का परीक्षण करेंगे। तो, चलो बस इस सामान का थोड़ा सा साफ करते हैं। ठीक है, तो अब देखते हैं ये बात। मैं सिर्फ एक जांच करने जा रहा हूँ और सुनिश्चित करें कि हमारे सभी रिसेक्शन ठीक हैं - मैलेट, कृपया। तो इसमें एक अच्छा फिट है - सभी हिस्सों को ठीक से लाइन करता है। यह दिखता है लगभग 100% हड्डी संपर्क की तरह, इसलिए मैं - फिर से, प्रेस-फिट नहीं होने का कोई कारण नहीं है यह बात। तो मुझे लगता है कि यह ठीक है। इसलिए मुझे एक रोंगेर की जरूरत है। यहां थोड़ा सा कार्टिलेज है बस एक बहुत ही रूढ़िवादी डिस्टल से कटौती। हमें डिस्टल को फिर से काटना पड़ सकता है, जो स्पष्ट रूप से दुनिया का अंत नहीं है। यह करना बहुत आसान है। यह फिर से कटौती का वह क्रम होगा। ठीक है, चलो अचार का कांटा देखते हैं। इसलिए मैंने इसे प्राप्त करना सीख लिया है - बस आगे बढ़ने और कटौती करने के लिए मोहक है टिबिया आगे, लेकिन मैंने इस सामान को साफ करना और प्राप्त करना सीख लिया है टिबियल एक्सपोजर पहला। क्या आपके पास आगे एक रेक है, सहयोगी? ठीक है, वहां एक हाथ रखो, और हम यहां एक रेक लगाएंगे। बस उस कोने में चूसो। मैं बाकी के उपचार प्राप्त करना चाहता हूं मेनिस्कस - बोनी, कृपया। यह यहां थोड़ा सा पोस्टरोमेडियल मेनिस्कस था। हां, मैं सामने आ रहा हूं - क्षमा करें, कर्टनी। यह हमेशा मामले का डरावना हिस्सा है - बाहर नहीं निकलना चाहता एमसीएल। रोंगेउर, कृपया। हम इसका उपयोग इस मेनिस्कस के बाकी हिस्सों को स्पष्ट करने के लिए करते हैं। हम वापस आएंगे और बाद में कोई अवशेष प्राप्त करेंगे। जब मैं पीछे के घुटने को साफ करता हूं। वहीं - और फिर हम एक जेड लेंगे और रेक निकालेंगे। तो जेड इस औसत दर्जे के टिबियल पक्ष को उजागर करेगा। हाँ, स्मिथ पीटरसन - थोड़ा सा है औसत दर्जे का ओस्टियोफाइट, ताकि यह जारी किया जा सके - यह हमें ढीला करने जा रहा है थोड़ा और अधिक उपचारात्मक रूप से। बस इस उपचारात्मक सामान में से कुछ को साफ करने जा रहा हूं - उफ़। ठीक है, और झुकी हुई पकड़। फिर हम डालेंगे इस तरफ - कोई कार्रवाई नहीं। ठीक है - बहुत धीरे से वहां - अग्रभाग और एक हाथ - बस स्लाइड करें और ऊरु सरणी देखें। बोनी, कृपया। हम यहां पेटेलर कण्डरा पर थोड़ा तंग हैं, लेकिन मुझे लगता है कि हम बस इसे छोड़ने जा रहे हैं। मुझे लगता है कि क्वाड थोड़ा तंग भी है। और एक रोंगेर। बस मेनिस्कस को साफ करें। यह टिबियल हड्डी के आसान निष्कर्षण की अनुमति देता है एक बार शोधन हो जाने के बाद, मुझे लगता है। सही होने की ज़रूरत नहीं है - बस इस सामान में से कुछ को बाहर निकालें। ठीक है, यह बहुत अच्छा लग रहा है. कर्टनी, मुझे लगता है कि हम ठीक हो जाएंगे। हमें अपना काम करना होगा पार्श्व रोटेशन थोड़ा सा, लेकिन हम देखेंगे। बहुत बुरा नहीं है. ठीक है, इसलिए मुझे किसी भी प्रमुख वापसीकर्ता को रखने की ज़रूरत नहीं है इसके लिए। हम बस रोबोटिक हाथ लाएंगे और मैदान पर वापस देखेंगे, और हरे रंग की जांच देखें। इसलिए अब हमें अपने टिबियल बिंदु की जांच करनी है, जो अच्छा है, और हमारा ऊरु बिंदु – मेरा मतलब है कि हमारे आरा ब्लेड, जो कभी-कभी लेता है एक सेकंड - अच्छा, यह ठीक था। और फिर हम इसे सेट करेंगे ताकि यह संरेखित हो। यह ठीक लग रहा है. यह खुश है.
अध्याय 11
इसलिए मुझे वास्तव में सावधान रहना होगा कि लोगों को कोई नुकसान न हो। इसके साथ पेटेलर कण्डरा, क्योंकि आरा ब्लेड को पता नहीं है कि कण्डरा कहां है, इसलिए हम उपचारात्मक शोधन के साथ शुरू करेंगे। उफ़, मेरा बुरा - मैंने बहुत जोर से धक्का दिया। चलो फिर से कोशिश करते हैं। इसलिए मुझे इसे मैदान से बाहर लाना पड़ा और वापस अंदर, क्योंकि मैंने उस स्क्लेरोटिक हड्डी पर बहुत जोर से धक्का दिया। इसलिए मैं बस सावधान रहने जा रहा हूं और चुपके से आगे बढ़ रहा हूं। वहां बेहद स्क्लेरोटिक मेडियल हड्डी - बस इसके साथ वास्तव में सावधान रहना था इसलिए मैं कूद नहीं पाया या कुछ भी अजीब नहीं हुआ। अब हम पार्श्व पक्ष पर काम करेंगे।
इसका एक हिस्सा मैं रोबोट को निगल रहा हूं क्योंकि हमारे पास पर्याप्त भ्रमण नहीं है उस पार्श्व पक्ष को मारना। मुझे लगता है कि मैं कर सकता हूँ बस ओस्टियोटोम के साथ ऐसा करें, इसलिए - क्योंकि यह सिर्फ एक छोटा सा हिस्सा है एंटेरोलेटरल। धन्यवाद, कर्टनी - यह बहुत उपयोगी था। मुझे ऐसा नहीं लगता क्योंकि मुझे वहां पर पर्याप्त कोण नहीं मिल रहा है, और उसका कण्डरा है थोड़ा तंग। इसलिए मैं कण्डरा को घायल करने का जोखिम नहीं उठाना चाहता, इसलिए हम इसे सिर्फ एक ओस्टियोटोम के साथ करेंगे। यह बस थोड़ा सा हिस्सा है सामने जिसे तोड़ने की जरूरत है।\ NMallet, हाँ। वहाँ - यही वह है। तो अब एक रोंगेर - ताकि सब कुछ जारी हो जाए, और हम बस इस चीज को आगे बढ़ाएंगे। हाँ, यह एक अच्छा निर्णय था। हम कर सकते हैं उस रिलीज के कारण 11 पॉली के साथ समाप्त होता है, लेकिन यह ठीक है सिर्फ इसलिए कि मैं - हड्डी यहां बहुत स्क्लेरोटिक थी। मुझे लगा कि हमने ऐसा नहीं किया। एक मोटा पर्याप्त कट है। देखें कि वह कट कितना पतला है? यह मुश्किल से नीचे आ गया। यह मुझे बनाता है आश्चर्य है कि क्या हमें वरस की एक और डिग्री की भी आवश्यकता है। हमें ऐसा करने में सक्षम होना चाहिए उस। हम्म - मुझे आश्चर्य है कि क्या हमें ऐसा करना चाहिए। जेस यदि आप रोबोट के आधार को स्थानांतरित करते हैं, तो क्या यह कुछ भी प्रभावित करेगा? मैं हम बस सोचते हैं - मुझे कुछ भी करने से पहले बस देखने दें – मुझे बस देखने दो। मुझे बस जरूरत है - मुझे इस तरह से अधिक भ्रमण की आवश्यकता है। क्या आप इसे अंदर धकेल सकते हैं? थोड़ा सा? हाँ, यह मदद करता है. हाँ, यह अच्छा है. चलो इसे एक कोशिश देते हैं। हाँ, यह ठीक है. मैं बस उस पूर्ववर्ती हड्डी को वहां पकड़ना चाहता हूं। एक छोटा सा होंठ है। यह है - हम यहां थोड़ा सुधार कर रहे हैं क्योंकि यह होंठ नहीं हुआ है, लेकिन एक प्रेस-फिट, मैं इसे इस तरह नहीं छोड़ सकता - निश्चित रूप से नहीं। अब क्या मुझे जरूरत है पुन: मान्य करना, या यह ठीक है? ठीक। ठीक है, इसलिए हम बस यह करने जा रहे हैं चीज खुद को अंदर बंद कर लेती है वहाँ। तो यह एक ही रिसेक्शन प्लेन में होगा। यहन वास्तव में बहुत अच्छा है। नहीं, मुझे लगता है कि हम ठीक हैं। हाँ, अब मैं इसे साफ़ कर सकता हूँ। चलो इसे बाहर निकालते हैं। और अगर आप वहां पीछे की ओर चूस सकते हैं, कर्टनी, एक सेकंड के लिए। हाँ। ग़जब का। यह वास्तव में अच्छा था। हमें पहले ऐसा नहीं करना पड़ा है, जो – जो उस एंटेरोलेटरल हड्डी को साफ करने के लिए था। चलो देखते हैं कि काला ओस्टियोटोम फिर से। और इसलिए रोबोटिक हाथ सिर्फ एक आदर्श पर वापस चला जाता है शोधन के लिए स्थान, और वहां यह है। रोंगेउर। तो यह है कि एंटीरोलेटरल हड्डी जो थी - तुम अच्छे हो, कर्टनी - यह रास्ते में आने वाला था। क्षमा करें, यह थोड़ा खूनी है। हमारा टूर्निकेट पूरी तरह से काम नहीं करता है। ठीक है, मुझे लगता है कि यह बहुत अच्छा लग रहा है। अब हम टिबियल बेस प्लेट का परीक्षण करेंगे। हाँ, आकार 3 अच्छा लग रहा है, तो चलो एक फ्लैट लामिनार स्प्रेडर देखते हैं। अब हम हैं जांच करने और देखने जा रहे हैं कि हमने कैसे किया। हाँ, आप उस Z को बाहर निकाल सकते हैं। फिर हम इस अंतर की जांच करेंगे। उफ़ - मैं वहां औसत दर्जे के पार्श्व मेनिस्कस पर कदम रख रहा हूं। यह अभी भी 9 के लिए थोड़ा तंग दिखता है। मुझे खुशी है कि हमने उन 2 को अतिरिक्त लिया। बोनी। अब फ्लेक्सन गैप भी कुछ हद तक कम हो जाता है क्योंकि मैं पीसीएल को बाहर निकालता हूं। मैंने इसे पहले घायल कर दिया था, लेकिन मैंने वास्तव में इसे पूरी तरह से साफ नहीं किया। मुझे पता है कि कुछ लोग कहेंगे कि यह है - रोबोटिक हाथ एक महान है घुटनों को क्रूस पर रखने का कारण, क्योंकि यह वास्तव में आपको घुटने को संतुलित करने की अनुमति देता है बहुत सटीक, और मेरे मुख्य कारणों में से एक क्रूस पर चढ़ाए जाने से दूर जाने के लिए घुटने हैं कि मैं अपनी कमियों को महसूस करता हूं। लेकिन पीसीएल सुंदर दिखता है अच्छा है, लेकिन मेरे पास सिर्फ है - बस एक पश्चवर्ती स्थिर व्यक्ति होने में संक्रमण हुआ है, भले ही मुझे लगता है इसे बनाए रखना यहां क्रूसिएट लिगामेंट बहुत उचित होता। घुटनों में जो नहीं हैं इस तरह बहुत पैथोलॉजिकल, मैं आमतौर पर इस हिस्से तक पीसीएल छोड़ देता हूं, मुझे नहीं लगता कि यह ज्यादा करता है। यह अंतर को थोड़ा ढीला कर देता है, लेकिन घुटने जो बहुत पैथोलॉजिकल हैं, जहां पीसीएल बहुत तंग या बहुत अक्षम हो सकता है, मैं इसे शुरू में बाहर निकालूंगा इससे पहले कि हम ऐसा करें संतुलन। लेकिन मुझे नहीं लगता कि इससे इसमें ज्यादा फर्क पड़ने वाला है। घुटने टेक दिए, इसलिए मैंने इसे अब बाहर निकालने का फैसला किया। और एंटेरोलेटरल हॉर्न का थोड़ा सा हिस्सा - या पीछे का सींग पार्श्व मेनिस्कस, और फिर थोड़ा पोस्टरोमेडियल मेनिस्कस। मैं इससे अधिक समय बिताता हूं मैं घुटने के पीछे भी बस यह सुनिश्चित करता था सब कुछ अच्छा और साफ और साफ है। मेरा विचार है इससे बहुत दुख हुआ घुटने के प्रतिस्थापन कहाँ से आता है? अपूर्ण नौकरी यहाँ वापस आ गई है, इसलिए थोड़ा सा – जाहिर है पीसीएल की रक्षा। क्या आपके पास स्ट्राइकर घुमावदार ओस्टियोटोम है? हम जानते हैं कि यहां एक पश्चवर्ती ओस्टियोफाइट है, इसलिए मैं इसके साथ इसके पीछे जा रहा हूं। अंतर काफी सममित लग रहा है। यह अभी भी एक 9 की तरह दिखता है, तो मैं बस इस पश्चवर्ती ओस्टियोफाइट को यहां साफ करने जा रहा हूं और मेडियल ओस्टियोफाइट। और हड़पने वाला। तो यह पश्चवर्ती ओस्टियोफाइट का बहुमत है। चलो बस महसूस करते हैं - बहुत अच्छा। मैं अनुमान लगाने की कोशिश करें कि इम्प्लांट क्या है आकार यह सुनिश्चित करने के लिए होगा कि हम बचाव करें यह पर्याप्त है और यह अतिक्रमण नहीं करता है। थोड़ा और अधिक - यहाँ उपचारात्मक रूप से। चलो उस ओस्टियोटॉमी को फिर से देखते हैं। हम वहाँ चलें। चलो देखते हैं कि यह चोर है। अगर मुझे यह नहीं मिल सकता है तो मुझे एक कोण उपचार की आवश्यकता हो सकती है। अरे नहीं, मुझे समझ में आया। वहाँ, वह था पोस्टरोमेडियल ओस्टियोफाइट हमने स्कैन पर देखा। हाँ, वह अच्छा लग रहा है. अब हम दूसरे तरीके से फ्लिप करेंगे, इसलिए एक अच्छा सममित दिखने वाला अंतर। यह 9 के बारे में दिखता है। हम करेंगे यहां एक सेकंड में एक उद्देश्य माप प्राप्त करें, लेकिन मैं हूं बस घुटने के पिछले हिस्से को साफ करें। शायद हम इसे समायोजित कर सकते हैं थोड़ा हल्का। मेरी पहुंच को क्षमा करें। वहां हम जाते हैं - बोनी फिर से। तो अब यहां पार्श्व मेनिस्कस का थोड़ा अवशेष है। मुझे हमेशा लगता है कि मामले की प्रगति आती है। एक डरावना पड़ाव यह हिस्सा क्योंकि हमें वास्तव में समय बिताना पड़ा और घुटने के पिछले हिस्से को अच्छी तरह से साफ करें। इसे पार्श्व टिबियल किनारे पर रखें। हम इसे थोड़ा और फ्लेक्स करेंगे। वहाँ हम चलते हैं। चलो अब उस ओस्टियोटोम को प्राप्त करते हैं - और एक मैलेट। इसलिए प्राप्त करने के लिए बहुत अधिक पार्श्व सामान नहीं है क्योंकि उसके पास यहां ज्यादा पैथोलॉजी नहीं है – वास्तव में बस किसी भी अवशिष्ट आर्टिकुलर कार्टिलेज को तराशने की कोशिश कर रहा है। यह अच्छा है, और चलो उस हड़पने वाले को देखते हैं। ठीक है, यह करना चाहिए। मुझे बस महसूस करने दो। हाँ, यह अच्छा और साफ लगता है। ठीक है, हम अब इंजेक्शन लेंगे।
हम करते हैं एपिनेफ्रीन के साथ थोड़ा चौथाई प्रतिशत मार्केन - घुटने के पिछले हिस्से में थोड़ा सा डालें – थोड़ा सा केंद्र। मैं बहुत कुछ नहीं कहता। और फिर हम सुनिश्चित करते हैं हमें यहां एक अच्छा सबकट - उप-आवधिक बुलबुला मिलता है - सुनिश्चित करें कि हम वास्तव में इसे नीचे ले जाते हैं एमसीएल म्यान अच्छी तरह से। यह एक अच्छा है. फिर हम पार्श्व रूप से जांच करेंगे। अच्छा अच्छा उप-आवधिक बुलबुला वहाँ - फिर पेस बर्सा में थोड़ा सा – चमड़े के नीचे के पूर्वकाल में थोड़ा ऊपर। ठीक है, अब हम पता लगाएंगे कि हमने कैसे किया। ठीक है, कर्टनी, अगर आपको अपने दाईं ओर कदम रखने में कोई आपत्ति नहीं है।
अध्याय 12
नहीं, हम इसे छोड़ सकते हैं - शायद एक सेकंड में। मुझे इसका परीक्षण करने दीजिए। तो चलो 3 सीआर पर एक 9 देखते हैं। हम क्रूस पर चढ़ने का मुकदमा चलाने जा रहे हैं प्रत्यारोपण क्योंकि अगर मुझे समायोजन करने की आवश्यकता है मैं किसी भी चीज के लिए प्रतिबद्ध नहीं हूँ, और फिर 3 सीआर फीमर शायद एक 11। हम देखेंगे कि यहां क्या होता है। बिलकुल ठीक। ठीक है, अब हम देखेंगे कि हमने अपने संतुलन के साथ कैसा प्रदर्शन किया है या नहीं उस अतिरिक्त मिलीमीटर को लेकर दंडित किया जाता है। नहीं, मुझे लगता है कि यह अच्छा होने जा रहा है। इसलिए हम इसे खत्म कर देंगे, इसलिए अब देखते हैं कि हमें क्या मिला। तो हम अभी भी थोड़ा सा फ्लेक्सन कॉन्ट्रैक्टर है, जो हमने सोचा कि एक चिंता का विषय हो सकता है, और लचीलेपन में, हमारे अंतराल बहुत अच्छे दिखते हैं – 19, 19 – इसलिए – और वहाँ है कोई अस्थिरता नहीं। अगर कुछ भी हो, हम दोनों दिशाओं में थोड़ा तंग हैं, जेस। यकीन नहीं है कि मैं - चिकित्सकीय रूप से, यह मेरे लिए फ्लेक्सन कॉन्ट्रैक्टर की तरह नहीं दिखता है। मुझे नहीं पता। उस– मैं कहूंगा कि यह एक फ्लेक्सन कॉन्ट्रैक्टर है, इसलिए मुझे लगता है वह बहुत सीधी है, भले ही वह बात 6 कह रही है। मैंने कहा कि मैं इसे कभी स्वीकार नहीं करूंगा, लेकिन चलो देखते हैं। यह एक बहुत ही दृढ़, कठोर घुटना है, आप जानते हैं? अगर हम एक और छुट्टी लेते हैं टिबिया, यह हमें विश्व स्तर पर ढीला कर देगा, जो मुझे लगता है कि नहीं हो सकता है एक बुरा विचार। टूर्निकेट अभी भी ऊपर है - इसलिए यह होगा - वह - यही है - क्वाड के कारण मेरी पेटेलर ट्रैकिंग सही नहीं है। नहीं, क्योंकि मुझे लगता है कि पटेला ठीक से ट्रैक करने जा रहा है। यह सिर्फ एक सवाल है - एक निर्णय कॉल अब क्या मुझे लगता है कि यह किया गया है, या हमें टिबिया से एक और मिलीमीटर की आवश्यकता है। एमसीएल ठीक महसूस करता है। समग्र संतुलन में बहुत कम विविधता है, पूरे समय लंबी शिथिलता है पूरी बात। मैं कहूंगा कि यह थोड़ा तंग पक्ष पर है। चलो टिबिया से एक और करो, और - और फिर यह सिर्फ एक समय लगेगा दूसरा। मुझे फीमर खींचने के लिए हैंडल देखने दें। तो हम जा रहे हैं एक समायोजन करें - मुझे लगता है कि घुटने थोड़ा तंग प्रकार का है चारों ओर, और इसलिए हम जा रहे हैं – हम एक और मिलीमीटर लेने जा रहे हैं, जो हमें किस पर ले जाता है? 8.5 पार्श्व? ओह, आपने इसे पहले ही किया है? ठीक। हाँ, अचार कांटा. हाँ। मैं आगे बढ़ूंगा और इसे छोड़ दूंगा। ठीक है। मुझे यकीन नहीं है कि यह क्या था। ठीक है, मुड़ा हुआ। बस थोड़ा सा जोड़ने के लिए यहां अतिरिक्त सावधानी बरतें – अन्तर। मुझे लगता है कि यह ठीक होने जा रहा है - और एक जेड। ठीक है, मुझे लगता है कि आप अच्छे हैं, कर्टनी। ठीक है, हम इसे वापस लाएंगे। आइए हमारी ग्रीन जांच को आखिरी बार देखें। तो यह अच्छा है, और हम आरा ब्लेड की जांच करेंगे। तो सचमुच, हम एक बना रहे हैं यहां 1 मिलीमीटर तक सुधार, जो एक असामान्य बात है। मैंने ज्यादा कटौती नहीं की है। हम वहाँ चलें। शायद मैं छेद में नहीं था। वह रहा। ठीक। बिलकुल ठीक। मुझे श्निट देखने दो। हाँ। ठीक है, तो एक और लकीर। विडंबना यह है कि यह सरकार की वास्तविक शक्ति है। ब्लेड देखा कि यह ऐसा कर सकता है। ठीक है, हम उपचार करेंगे सबसे पहले, क्योंकि यही वह जगह है जहां हड्डी वास्तव में कठिन है। बहुत बेहतर - हम अब सबकॉन्ड्रल हड्डी के नीचे हैं। मुझे यह कटौती बहुत पसंद है वास्तव में बेहतर। मुझे खुशी है कि हमने यह किया। ठीक है, गड़बड़ी के लिए खेद है। ठीक। हाँ, धन्यवाद कर्टनी. यह सब अंदर चूसो। यह थोड़ा सा होंठ है। हाँ, रोंगेर. बस मेरे लिए वहां एक हाथ रखो, और फिर हम इसे फिर से परीक्षण करेंगे और देखेंगे कि हम कहां हैं। हाँ, वास्तव में यह सब ठीक है। यह सब ठीक है। ठीक है, चलो इसे फिर से परीक्षण करते हैं। चलो इन्हें बाहर निकालते हैं और देखते हैं। वह कटौती बेहतर लग रही है। यह उस सबकॉन्ड्रल के माध्यम से सही था। शायद वहाँ थोड़ा सा अस्थि मज्जा या कुछ और था यह इसे तंग बना रहा था। ठीक है - और फीमर। ठीक है, मैलेट। ठीक है, यह बहुत अच्छा है. हाँ, यह बेहतर लगता है। हाँ। इसके बारे में सब कुछ बेहतर है। देखो, अब हमारे पास हमारा है फ्लेक्सन केवल 3 ° तक नीचे है, जो बहुत बेहतर है। यांत्रिक संरेखण 2 ° है और 20 के दशक, जो ठीक है, और अब थोड़ा सा है खेलते हैं, जो बहुत बेहतर भी है। जिस पेटेला के बारे में मैं चिंतित नहीं हूं क्योंकि टॉर्निकेट अभी भी ऊपर है। हाँ, इसके बारे में सब कुछ बेहतर है। उस 1 मिमी अंतर बनाता है यह एक बहुत ही खुश घुटना है। तो हम अपने ऊरु रोटेशन को चिह्नित करेंगे - टिबियल रोटेशन, मेरा मतलब है, किसके सापेक्ष फीमर। ठीक है, और हम इसे फ्लेक्स करेंगे। ठीक है, आप अब टूर्निकेट को कम कर सकते हैं। और हम रोबोट के साथ अच्छे हैं। कृपया, मैं आगे ऊरु लुग ड्रिल लूंगा। तो अब यह मामले के रोबोटिक हिस्से के लिए है। हमने सब कुछ स्वीकार कर लिया है। अब मुझे प्रत्यारोपण लगाने के लिए हड्डी की तैयारी पूरी करनी थी। आइए सुनिश्चित करें कि सभी पद बहुत अच्छे दिखते हैं, इसलिए हम लुगोलों को ड्रिल करेंगे। ठीक है, फीमर रिमूवर - काला हैंडल - और टिबियल हैंडल। तो अब मुझे सरणियों को हटाना होगा क्योंकि ये पिन रास्ते में हैं। मुझे एक श्निट की आवश्यकता हो सकती है। ये पिन रास्ते में हैं टिबियल बेस प्लेट, इसलिए हम इसे बाहर निकाल देंगे। मैं रोंगेर ले लूँगा। हाँ। रोगी की ओर धक्का देना जारी रखें। एकदम सही - दूसरे को पकड़ो। यहां ऊरु चेकपॉइंट आता है। हमें सब कुछ प्राप्त करना है ये छोटी-छोटी तीखी बातें यहां से निकल जाती हैं। टिबियल चेकपॉइंट - ठीक है। वह रहा। हाँ, उन दोनों को खींचो लोग। अपने हाथ को थोड़ा सा छोड़ दें। तुम वहाँ जाओ। एकदम सही - एक और। फिर हम व्हेल की पूंछ लेंगे। अब समझ में आया। पूर्ण। ठीक है, तो अब ... ठीक। चलो कट बॉक्स कटर देखते हैं। तो यह अब मानक मुद्दा है। हम वापस आ गए हैं काटे गए बॉक्स के लिए रिसेक्शन बनाना - और उस पर एक पिन कॉल-इट एडाप्टर। पूर्ण। फिर हम एक लंबे सिर वाले पिन का उपयोग करेंगे। कोर्टनी के पास यह है। ठीक वहीं। हम लेंगे - यह ठीक है, और हम रेसिप को लेंगे। धन्यवाद। मुझे पता है कि यहां से यह सब अच्छी हड्डी निकालना दुखद है। ठीक है, मुझे लगता है कि यह बहुत अच्छा लग रहा है। आपको यहाँ से जाना है। हम पीएस का परीक्षण करेंगे - धन्यवाद। हम बस यह सुनिश्चित करेंगे कि यह हमारी पसंद के अनुसार फिट बैठता है। यह मुझे बहुत अच्छा लग रहा है। थोड़ा नरम ऊतक पकड़ा गया है, लेकिन यह ठीक हो जाएगा। हम एक लैप स्पंज लेंगे। अचार कांटा। ग़जब का। आप बहुत अच्छा कर रहे हैं सहयोगी, धन्यवाद।
अध्याय 13
इसके बाद, हम टिबिया को प्रेस-फिट सामान के साथ पंच करेंगे। ठीक है, कर्टनी, आपको यह मिल गया? हाँ। मैं बंप को सामने की ओर मोड़ने जा रहा हूं। मुझे लगता है कि उस अतिरिक्त मिलीमीटर को लेना एक अच्छा फैसला था। वह बस था थोड़ा तंग। अग्रभाग और एक हाथ – शानदार। मैं बस इस प्रकाश को स्थानांतरित करने जा रहा हूं। हाँ अच्छा है। अब हम नंबर 3 टिबियल बेस प्लेट के साथ एक श्निट लेंगे, और फिर दो छोटे सिर वाले पिन। इसलिए, मैंने रोटेशन को चिह्नित किया जब घुटने का विस्तार हो रहा था। सुनिश्चित करें कि यह अच्छा और सपाट बैठा है, क्योंकि यह यह एक पुनरावृत्ति थी। ओह नरम ऊतक है - यही कारण है। हाँ। हम वहाँ चलें। हां, बस 1 से 3 एक। ठीक है, छोटे सिर वाले पिन - इसलिए मैंने रोटेशन को स्थिति में सेट किया। इनमें से एक और - यह मामले का सबसे कठिन हिस्सा है - इसे सौंपना। ठीक है, यह वास्तव में बहुत अच्छा लग रहा है। आप आकार 3 टिबियल बेस प्लेट खोल सकते हैं, कृपया। यह अच्छा लग रहा है. अब हम टॉवर पंच लेंगे। हाँ, और छोटा पंच, प्रेस-फिट एक। यह सही है.\N3? जी हाँ। तो यह सिर्फ कील बनाता है। उसकी हड्डी की गुणवत्ता अच्छी है, इसलिए मुझे लगता है कि प्रेस-फिट एक अच्छा विकल्प है उसके लिए। गड़बड़ी के लिए खेद है। यह अच्छा लग रहा है. और फिर हम इस आदमी को बाहर निकालेंगे। शायद। यहां आपके दो छोटे पिन वापस हैं, और फिर यह बात चार छोटे लुगोलों के लिए जगह बनाता है। सुनिश्चित करना होगा यह अच्छा और फ्लश है। यह अच्छा लग रहा है. और फिर थोड़ा तेज ड्रिल लुग्स के लिए तैयार है। एक दो तीन चार। ठीक। मैं एक कोचर या एक श्निट ले जाऊंगा - शायद एक श्निट ठीक है। अच्छा - और फिर असली टिबियल बेस प्लेट। तो चूंकि यह प्रेस-फिट है, हमें कोई ठोस काम नहीं करना है। मैंने बस किया है यह सुनिश्चित करने के लिए कि सब कुछ साफ है। अच्छा। हम यहां इस छोटे से लैप स्पंज का उपयोग करेंगे। ठीक है, चलो देखते हैं। तो यह असली बेस प्लेट है। इसमें एक टाइटेनियम है - यह एक टाइटेनियम है एक के साथ बेस प्लेट छिद्रपूर्ण कोटिंग और चार छोटे स्पाइक्स यहां। तो चाल इस पर इसे सीधे नीचे जाना होगा। उसके पास इतना छोटा सा है पुटी, हुह? क्षमा करें, मैंने अभी यहां एक छोटी सी पुटी देखी है। ओह हाँ, यह कुछ भी नहीं है। ठीक है। हम बस इसे वहां सावधानी से सेट करेंगे। इसे थोड़ा खींचें। ठीक है, मैलेट, कृपया। इसलिए– तो हम बस इसे शुरू करेंगे, और फिर हम यह सुनिश्चित करेंगे कि कहीं भी कोई नरम ऊतक नहीं है। यह ठीक लग रहा है. यह ठीक लग रहा है. मुझे अपना हाथ थोड़ा आगे लाने की जरूरत है। यह बहुत अच्छा लग रहा है. ठीक है, अब हम सिर्फ एक जांच करेंगे और सुनिश्चित करेंगे कि कोई नहीं है नरम ऊतक कहीं भी। यह ठीक लग रहा है. मुझे लगता है कि हम वहां पार्श्व किनारे पर हैं। ठीक है, डबल बैंगर। चलो देखते हैं कि स्मिथ पीटरसन। मेरे पास बस थोड़ा सा है - वास्तव में मुझे लगता है कि यह नरम ऊतक है। हां, यह सब वहां ज्यादातर नरम ऊतक है - सुनिश्चित करें कि कोई मलबा नहीं है। यह अच्छा लग रहा है. पार्श्व पक्ष की जाँच करें। हाँ हम ठीक किनारे पर हैं। ठीक है, ऊपर और ऊपर।
ठीक है, आप बाएं 3 फीमर पीएस प्रेस-फिट खोल सकते हैं। आगे बढ़ो, कर्टनी। हम 9 मिमी सीआर परीक्षण लेंगे। टूर्निकेट नीचे है, इसलिए अब यह हमेशा थोड़ा खूनी होता है। हम सीआर परीक्षण लेंगे, कृपया - 3 के लिए 9। सीआर एक, कृपया। हम इसे एक सेकंड में करेंगे। वहां - और फिर फीमर। तो यह एक प्रेस-फिट लेपित घटक भी है जो इस पर मोती और हाइड्रॉक्सीपैटाइट होता है। ठीक है, मैलेट, कृपया। एक ही बात - हमें बस यह सुनिश्चित करना है कि कुछ भी अटक न जाए और यह सीधा हो, क्योंकि कभी-कभी ये थोड़े तंग हो सकते हैं। अब तक सब अच्छा है। हाँ, सुंदर भी लग रहा है. अच्छा। मैं बस जाँच करता हूँ। चलो डबल बैंगर देखते हैं। मेरा पक्ष जाने की जरूरत है एक मिलीमीटर नीचे। ठीक है, हाँ - बस मेरी ओर थोड़ा कोण करने की जरूरत है। मुझे अब यह मिल गया है। अच्छा - अच्छा सुरक्षित फिट। तो, हाँ - हम बस एक और बार सीआर के साथ जांच करेंगे। अच्छा लग रहा है. टूरनिकेट नीचे है, इसलिए पटेला अब फिर से पूरी तरह से ट्रैक कर रहा है। ताकि बहुत अच्छा लग रहा है.
अब हम पीछे की ओर सिर्फ एक अंतिम जांच करेंगे, और हम यह सुनिश्चित करने के लिए असली पॉलीथीन की जांच करेंगे यांत्रिकी भले ही कोई बदलाव नहीं करती है मुझे नहीं लगता कि वे करेंगे। और हम बस पार्श्व की जांच करेंगे। क्या आपके पास वास्तव में है यह सीधा होहमन? धन्यवाद, चलो पीछे देखते हैं – सुनिश्चित करें कि वहां कोई ओस्टियोफाइट या कुछ भी मजाकिया नहीं है। क्या आपके पास थोड़ा बल्ब है? अच्छा कुछ भी? नहीं, यह नरम ऊतक है। कोई सीमेंट नहीं है, इसलिए। यह ठीक लग रहा है. आइए उपचारात्मक रूप से जांच करें। वहाँ वापस चूसो कोर्टनी- हाँ। हाँ, ओस्टियोफाइट ठीक है। यह अधिक लटकना नहीं है। और फिर हम पार्श्व रूप से जांच करेंगे - व्यवस्थित जांच। उफ़ - वहाँ थोड़ा कुछ है - स्मिथ पीटरसन। हमेशा थोड़ा पार्श्व ओस्टियोफाइट होता है। बाकी सब कुछ स्पष्ट दिखता है, और फिर हम एक श्निट के साथ उपचारात्मक रूप से जांच करेंगे। अब समझ में आया। यह सब बहुत अच्छा लग रहा है। और चलो इसे देखते हैं। यह असली है पॉलीथीन पीएस परीक्षण। चलो इसे सेट करते हैं। अच्छा है - यहां थोड़ा नरम ऊतक फंस गया। अच्छा, इतना अच्छा सीधा घुटना - हाइपरएक्सटेंडेड नहीं, कोई फ्लेक्सन अनुबंध नहीं, जैसा कि हो सकता है, वास्तव में कोई वरस / वाल्गस शिथिलता नहीं है - लेकिन यह इससे बेहतर है। यह एक है टॉगल का छोटा सा हिस्सा, जो अच्छा है। पटेला पूरी तरह से ट्रैक करता है। गुरुत्वाकर्षण के प्रति लचीलापन क्या है? टन - 125 शायद, और मैं शायद 140 रन से आगे बढ़ सकता हूं - लेकिन वह नहीं मिलेगी उस। वह शायद वहां पहुंच जाएगा। बहुत शानदार। हम 3 - एक्स 3 के लिए 9 पीएस लेंगे - धन्यवाद। हम इसे ले लेंगे। ठीक है, बहुत अच्छा. हम अब असली पॉली लेंगे। यहां असली पॉलीथीन है। पश्चवर्ती स्थिर होता है – कोई नरम ऊतक नहीं। वहां, यह अच्छा है - और एक श्निट। हमेशा एक छोटा मोटा पैड होता है जो यहां फंसना चाहता है। यह काफी अच्छा है. मैं इसे आगे लाऊंगा। सुनिश्चित करें कि वहां कुछ भी नहीं है - यह अच्छा है। हाँ, यह अच्छा है. क्या यह इस तरह का अधिकार है, कर्टनी? ठीक है, हम इसे थोड़ा प्यार देंगे। हाँ, कोशिश करो और पॉली पर रहो. बस! यह अच्छा है। मुझे लगता है कि मैं अच्छी तरह से बाहर आया हूं। वह क्या है? ठीक है, क्या हमारे पास यहां रखने के लिए एक साफ - साफ सामान है?
अध्याय 14
क्या आपके पास एक साफ गोद है? धन्यवाद। ठीक है, दो कोचर – और क्विल। मैंने यहां एक्सटेंसर तंत्र के तनाव को सेट किया है। यही कारण है कि उपस्थित होने वाला कदम कोचर का है। इसे इसके ठीक बगल में रखें - एकदम सही। मैं एक नंबर 1 विक्रिल लूंगा। हम वसा पैड में एक सिलाई डालेंगे। मैंने सोचा कि यह घुटना ऐसा हो सकता है संतुलन बनाने के लिए डंक मारो, और मुझे खुशी है इसे कुछ समायोजन करना पड़ा क्योंकि हम दिखा सकते हैं कि हम ऐसा कैसे करते हैं। मैं यहां समीपस्थ वसा ऊतक में एक 0 परत चलाता हूं। हमने दो अच्छे फैसले लिए, जो थे कोण प्राप्त करने के लिए रोबोटिक आधार को स्थानांतरित करना क्योंकि पार्श्व भाग कठोर था, और फिर 1 मिमी। यह आश्चर्यजनक है कि क्या अंतर है, लेकिन यह कहां से चला गया 6-डिग्री फ्लेक्सन अनुबंध 3.\ N3, हाँ – इसके लिए 1 मिमी। मुझे लगता है कि स्क्लेरोटिक हड्डी ने आरी को थोड़ा सा हटा दिया होगा। शायद। और फिर जब हम इसके नीचे गए, तो यह था - यह वास्तव में लिया गया था सापेक्ष हड्डी के एक मिलीमीटर से अधिक क्योंकि वह स्क्लेरोटिक हड्डी ...\ ठीक है दोस्तों, धन्यवाद।
अध्याय 15
सर्जरी पूरी हो चुकी है। मुझे लगता है कि सब कुछ चला गया बहुत आसानी से। हमें कुछ समायोजन करने पड़े, जैसा कि मैंने बात की थी। प्रत्यारोपण से संबंधित पहले के बारे में। तुम– वास्तव में, मुझे खुशी है कि उनमें से कुछ यह सब इसलिए हुआ क्योंकि ज्यादातर मामले मुझे किसी भी तरह के काम करने की जरूरत नहीं है। रिकट या रोबोटिक स्थिति में परिवर्तन, लेकिन मैंने घुटने को कुछ कसकर महसूस किया अंतराल के सापेक्ष अंतराल के साथ किसके द्वारा भविष्यवाणी की जा रही थी? रोबोटिक हाथ - और इसलिए मैंने टिबिया को कुछ और बचाने का फैसला किया। मुझे लगता है कि वहां कुछ बहुत मोटी स्क्लेरोटिक हड्डी थी, और इसलिए हो सकता है कि इससे ध्यान भटक गया हो। ब्लेड को थोड़ा सा देखा - और यह बना दिया यह अंतर योजना से थोड़ा सख्त है। लेकिन एक बार जब पुन: शोधन हो गया, तो मैं घुटने को बहुत अच्छी तरह से संतुलित महसूस किया। यांत्रिक अक्ष को उचित रूप से 2 डिग्री तक पुनर्गठित किया गया था, जो यही हमने योजना बनाई थी। पेटेला बहुत अच्छी तरह से ट्रैक कर रहा था, और सभी इम्प्लांट निर्धारण उत्कृष्ट था। आप देख सकते हैं कि कैसे समायोजन किए गए थे, और इनके साथ मेरे लिए बड़ी सीखने की अवस्था रोबोटिक सर्जरी काफी हद तक जानता रहा है घुटने को कैसे समायोजित और संतुलित करें उस क्षमता के साथ जो हमने नहीं किया है सामने। कुछ बहुत जल्दी था फीमर को बाहरी रूप से घुमाने के लिए मैंने जो समायोजन किए थे और इसे थोड़ा सा पूर्ववर्ती लाएं, जिसने एक में हमारे अंतर को ढीला कर दिया दिशा दी और इसे दूसरे में कस दिया। और फिर मैंने थोड़ा सा स्वीकार कर लिया पोस्टरोलेटरल कोने में असंतुलन, जो एक के लिए एक सामान्य बायोमेकेनिकल शिथिलता है रोगी जिसके पास ज्यादा कुछ नहीं है अपक्षयी परिवर्तन पार्श्विक रूप से, और यह निकला यह वास्तव में बहुत अच्छी तरह से संतुलित है एक बार असली प्रत्यारोपण हो गया था। मुझे लगता है कि उपचारात्मक सर्जरी के दौरान रिहाई पो जारी किया - एक सममित अंतर बनाने के लिए संयुक्त स्थान पर्याप्त है। और कुल मिलाकर चाप और स्थिरता उत्कृष्ट थी, इसलिए मुझे लगता है कि सर्जरी अच्छी रही। मुझे लगता है कि समग्र समय सर्जरी की मात्रा के समान है। यह लगभग एक घंटे का टूरनिकेट समय था यहां तक कि दो समायोजन के साथ - भले ही मैं करता हूं प्रत्यारोपण के लिए लगाए जाने से पहले टॉर्निकेट को निष्क्रिय करें प्रेस-फिट प्रत्यारोपण। मुझे लगता है कि कुल मिलाकर सब कुछ बहुत आसानी से चला गया। आप इसके लिए क्षमता देख सकते हैं इस तकनीक को समझने में बेहतर होने के साथ इन अंतरालों और उपयोग को कैसे संतुलित करें प्रौद्योगिकी की शक्ति बहुत ही बारीक समायोजन करने के लिए सर्जरी से पहले और बाद में - वास्तव में मुझे लगता है कि आउटलायर्स को लाने की क्षमता है, एक कीनेमेटिक दृष्टिकोण के संदर्भ में यांत्रिकी में सुधार, यांत्रिक को समझना और सराहना करना इसके पहलू उन दो चीजों को एक साथ शादी कर सकते हैं इस तकनीक के साथ एक तरह से हम वास्तव में कभी भी फ्रीहैंड से ऐसा करने में सक्षम नहीं थे।