
Artroplastia total de rodilla asistida por brazo robótico Mako
Main Text
Table of Contents
La artroplastia total de rodilla (ATR) ha existido durante décadas y sirve como un procedimiento muy exitoso para aliviar el dolor y restaurar la función en una rodilla con enfermedad articular degenerativa avanzada. A lo largo de los años, ha habido muchos avances en la técnica quirúrgica y aún más en el diseño de implantes. Uno de los avances tecnológicos más recientes en TKA es el uso de un brazo asistido por robot para mejorar la planificación preoperatoria y la guía intraoperatoria con equilibrio articular dinámico y preparación ósea. Este artículo en video describe la técnica quirúrgica utilizada por el autor principal para realizar una ATR estabilizadora posterior en una rodilla degenerativa de deformidad en varo utilizando la asistencia robótica Mako.
La osteoartritis de rodilla es una enfermedad degenerativa que causa pérdida progresiva del cartílago articular. La incidencia de osteoartritis de rodilla sintomática es de alrededor de 240 por 100.000 por año. Los factores de riesgo incluyen traumatismo articular, una ocupación que requiere flexión repetitiva de la rodilla, debilidad muscular, gran masa corporal, sexo femenino, aumento de la edad, genética, raza (blanco > hispano > afroamericano) y síndrome metabólico (un síndrome que consiste en obesidad central o abdominal, dislipidemia, presión arterial alta y niveles elevados de glucosa en ayunas). Los cambios fisiopatológicos en el cartílago articular incluyen un aumento del contenido de agua, el colágeno se desorganiza, los proteoglicanos se alteran y eventualmente disminuyen en cantidad, pero el tamaño y el número de condrocitos permanecen iguales. El hueso subcondral intenta remodelarse, formando quistes líticos con esclerosis circundante. Los osteofitos óseos también se forman a través de la activación patológica de la osificación endocondral. La membrana sinovial pasa por cambios inflamatorios progresivos, llegando a ser hipervascular y cada vez más gruesa.
La paciente es una mujer de 66 años que presenta una historia de 2 años de dolor en la rodilla izquierda sin antecedentes de lesión o trauma. El dolor se ve exacerbado por la deambulación prolongada, subir escaleras y estar de pie durante mucho tiempo. Los tratamientos probados han incluido aparatos ortopédicos, medicamentos orales antiinflamatorios, inyecciones de corticosteroides con buen alivio temporal y fisioterapia formal. Ella tiene un historial médico de hipertensión, hiperlipidemia y ansiedad.
El paciente estaba cómodo, bien parecido y orientado al tiempo, al lugar y a la persona. Ella deambulaba con un andar antálgico. El examen de su extremidad inferior izquierda reveló que la piel estaba limpia e intacta en todas partes. Los compartimentos de los muslos y las piernas eran suaves. Tenía un rango de movimiento normal de la cadera sin dolor. Groseramente, su rodilla estaba en deformidad varo leve. Hubo un derrame moderado de rodilla. Tenía un rango de movimiento de la rodilla de 0 ° a 115 ° de flexión. Tenía sensibilidad sobre la línea de la articulación medial. Su examen del ligamento de la rodilla fue estable en el cajón anterior, Lachman, el cajón posterior y la prueba de esfuerzo en varo y valgo. Su mecanismo extensor estaba intacto y no tenía dolor con el levantamiento de la pierna recta. Estaba neurovascularmente intacta distalmente.
Las radiografías importantes que se deben tomar antes de decidir proceder con una artroplastia total de rodilla (ATR) incluyen AP que soporta peso, flexión PA, vistas laterales y de amanecer. A algunos cirujanos también les gusta revisar las radiografías de alineación de piernas largas. Las imágenes de este paciente revelaron cambios degenerativos severos con pérdida de espacio articular en el compartimiento medial y patelofemoral con contacto hueso con hueso, esclerosis subcondral y osteofitos periarticulares múltiples. Hubo una leve alineación mecánica en varo. La rótula estaba siguiendo centralmente en la vista del amanecer.
Además, se obtuvo una tomografía computarizada según el protocolo Mako para realizar la planificación preoperatoria y permitir que el robot Mako realice una guía intraoperatoria precisa. El protocolo CT es proporcionado por Mako.
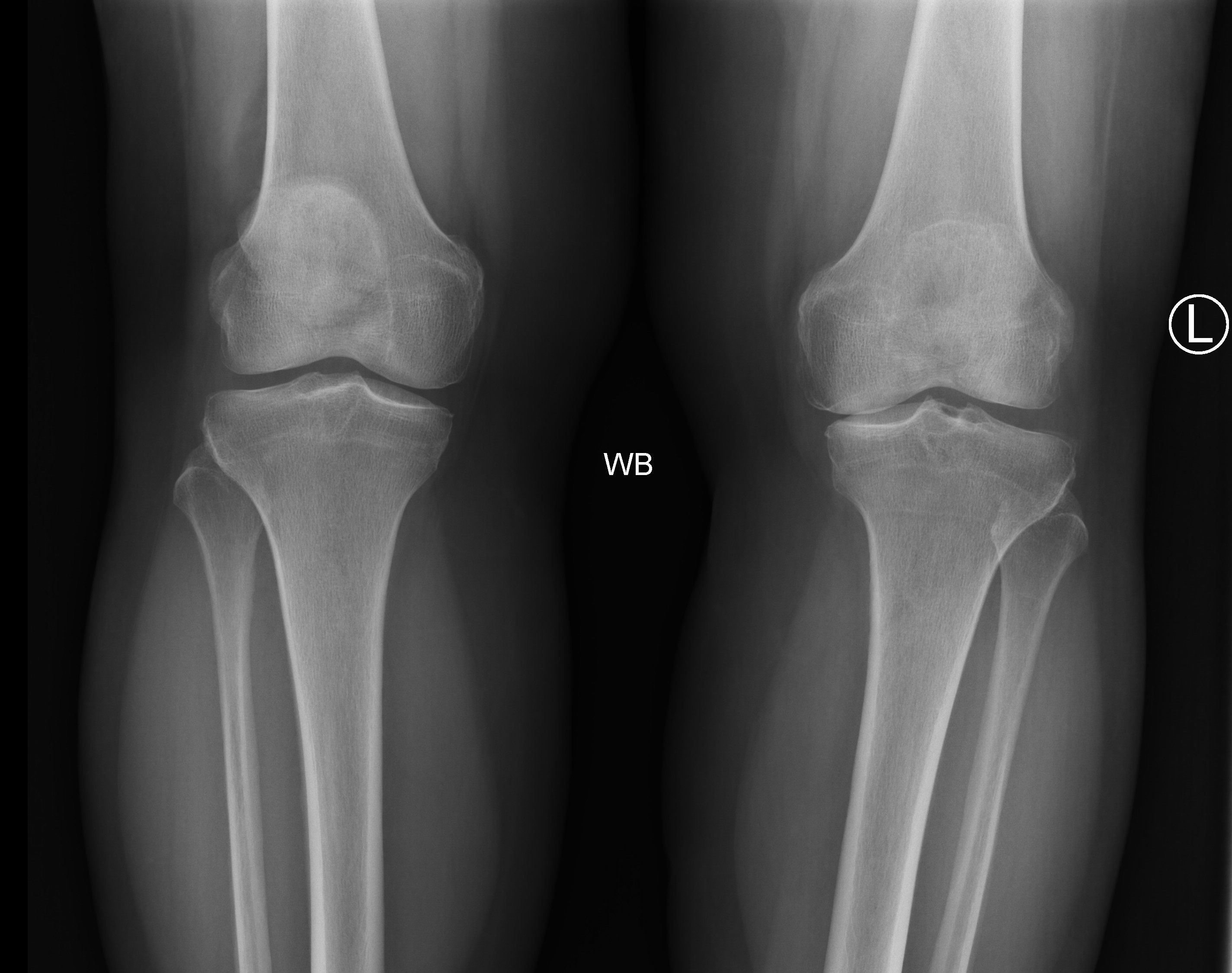
Figura 1a. Radiografía AP preoperatoria que muestra la deformidad vara de la paciente en la rodilla izquierda.
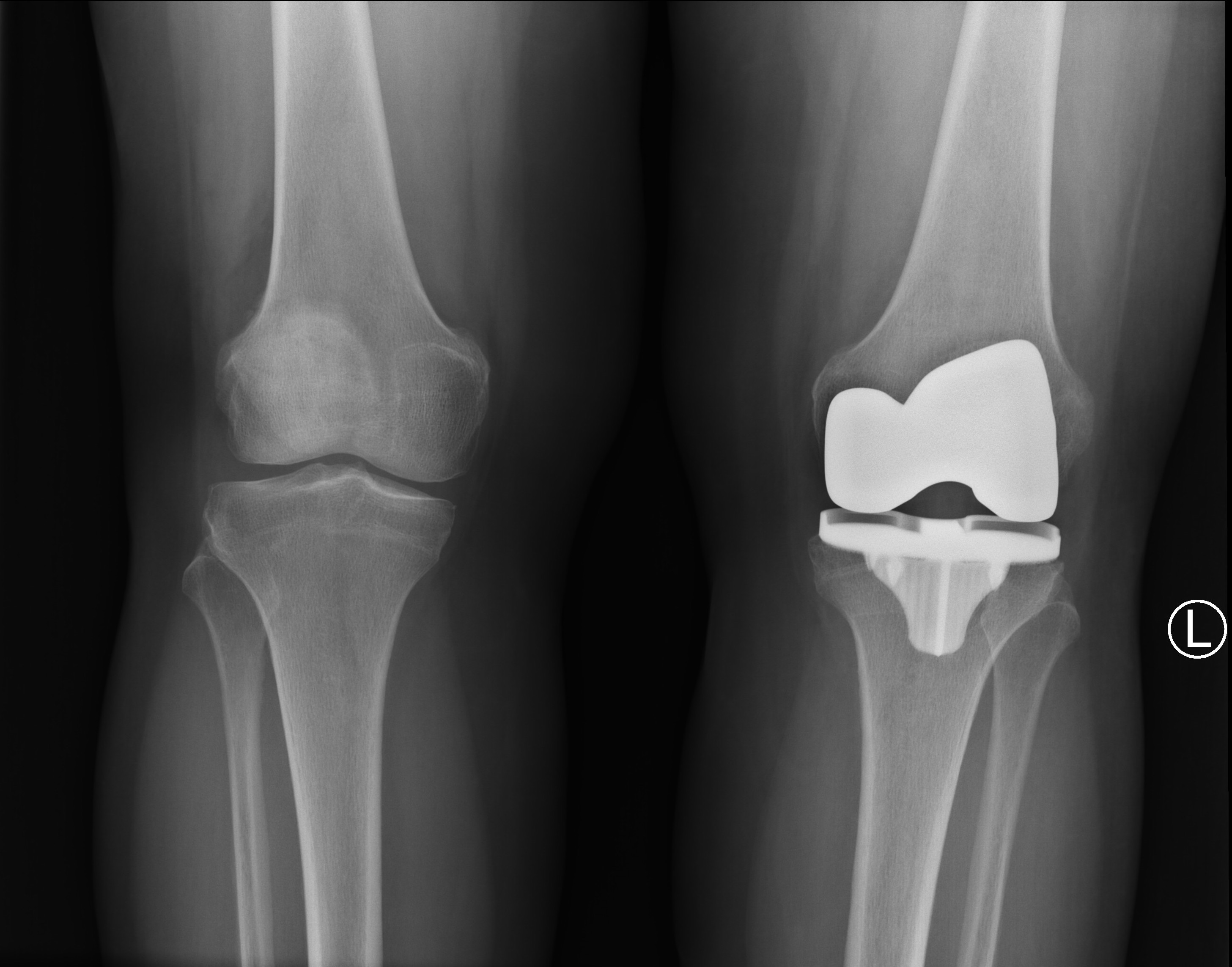
Figura 2a. Radiografía AP postoperatoria que muestra la restauración del eje anatómico adecuado.
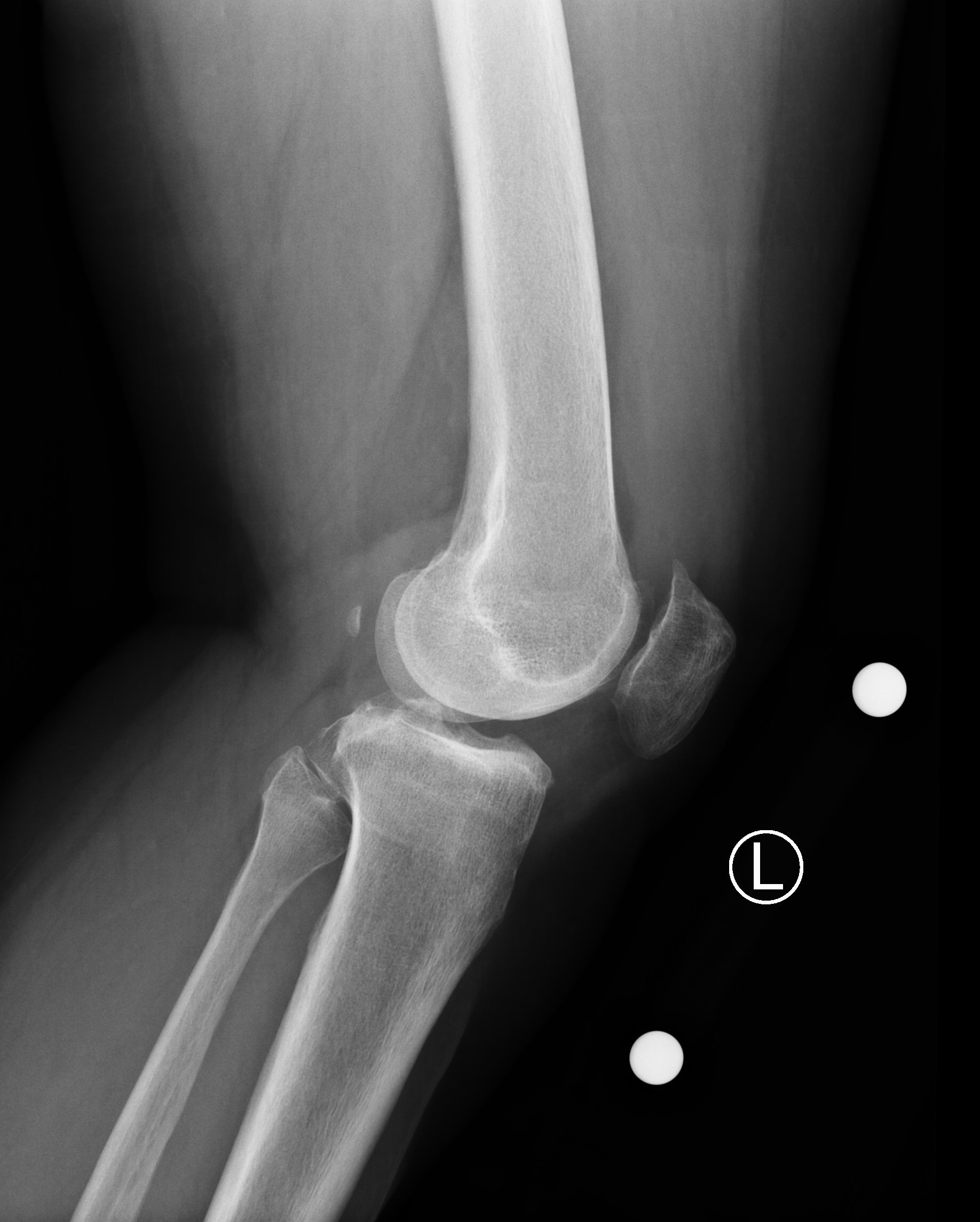
Figura 1b. Radiografía lateral preoperatoria que muestra la deformidad varo de la paciente en la rodilla izquierda.
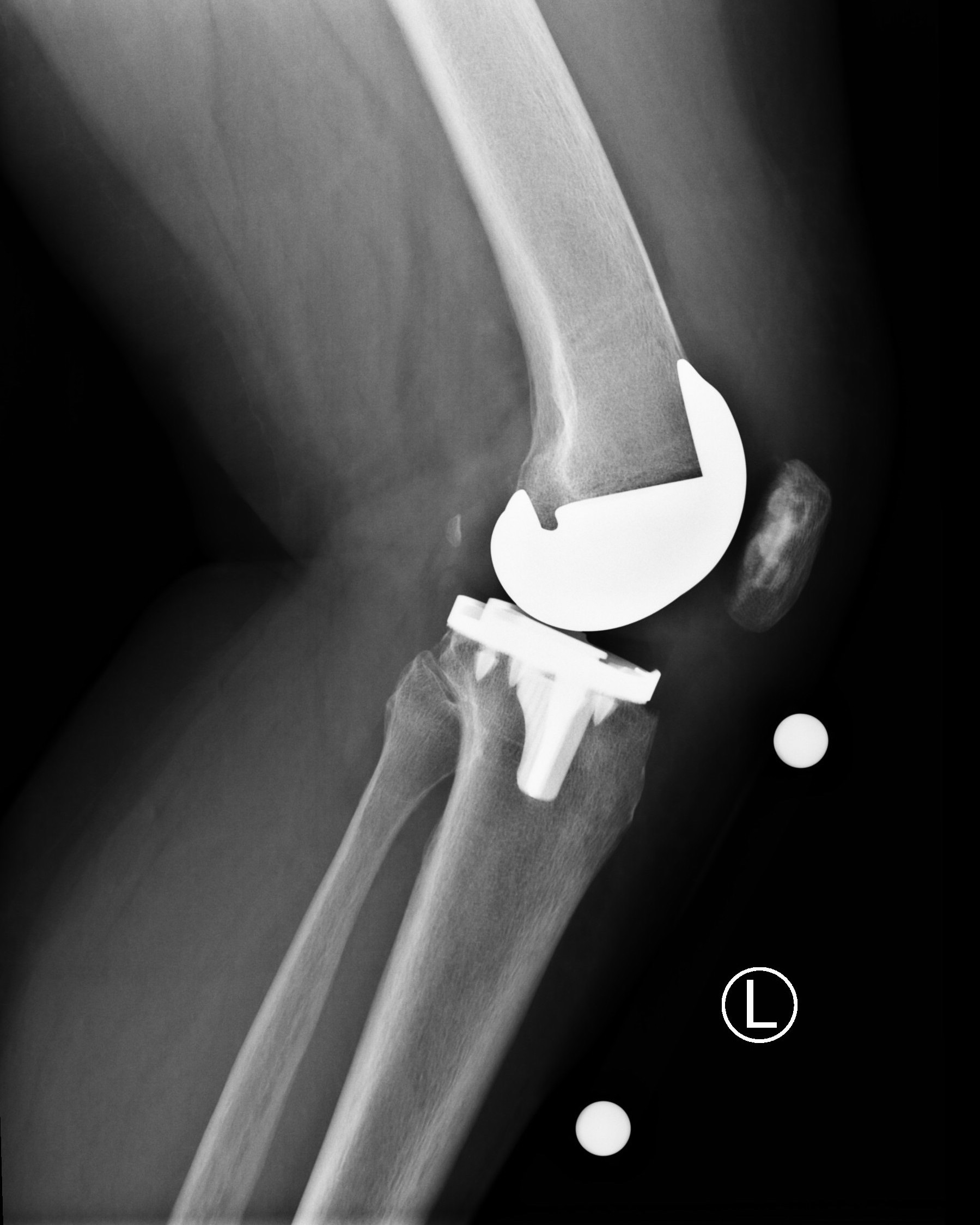
Figura 2b. Radiografía lateral postoperatoria que muestra la alineación y el tamaño adecuados de los componentes femoral y tibial.
La historia natural de la osteoartritis es progresiva, lo que lleva a un aumento del dolor y la discapacidad. Sin embargo, la tasa de progresión sintomática es variable de paciente a paciente. En general, es una progresión lenta donde los síntomas se vuelven más graves, frecuentes y debilitantes durante meses o años. A medida que la artritis y la deformidad empeoran con el tiempo, los pacientes experimentan una disminución en su función, incluido el rango de movimiento y la capacidad de deambular. Algunos pacientes tienen síntomas graves con solo una enfermedad leve visualizada en las radiografías, mientras que otros tienen poco o ningún síntoma con una enfermedad radiográfica grave. Los cirujanos deben tratar al paciente y sus síntomas.
El tratamiento para las rodillas osteoartríticas generalmente comienza con un manejo no quirúrgico que incluye la modificación de la actividad, como la reducción de los ejercicios de carga de impacto y la reducción de peso. Los medicamentos antiinflamatorios no esteroideos (AINE) también son tratamiento de primera línea. Otras opciones de tratamiento no quirúrgico incluyen acetaminofén, fisioterapia, inyecciones de corticosteroides, aparatos ortopédicos y el uso de un dispositivo de asistencia como un bastón o una muleta. Una opción quirúrgica que generalmente se reserva para pacientes más jóvenes con artritis compartimental medial o lateral aislada es una osteotomía para descargar el compartimiento afectado y corregir la deformidad. Las opciones de reemplazo articular incluyen reemplazo parcial de rodilla y reemplazo total de rodilla. Los riesgos y beneficios de la artroplastia se sopesan de forma individual. Los riesgos incluyen, pero no se limitan a, infección, sangrado, coágulos de sangre, daño a las estructuras circundantes, problemas de cicatrización de heridas, discrepancia en la longitud de las piernas, inestabilidad, dolor continuo, rigidez, fractura y necesidad de cirugía adicional.
La ATR es un procedimiento quirúrgico exitoso que proporciona alivio del dolor de manera confiable y una función mejorada en pacientes con enfermedad articular degenerativa. El paciente presentó cambios degenerativos de la rodilla izquierda. Tenía dolor severo asociado con la actividad y los hallazgos radiográficos de artritis moderada a severa. No había logrado obtener una función adecuada o alivio del dolor con ayudas para caminar, aparatos ortopédicos, fisioterapia, inyecciones y medicamentos analgésicos. Sobre la base de estos hallazgos y después de una discusión de decisión compartida con el paciente que incluyó describir los riesgos del procedimiento, se tomó la decisión de proceder con la cirugía de reemplazo de rodilla.
La selección del paciente para un ATR asistido por robot Mako depende en gran medida del juicio del cirujano. Las cosas a considerar incluyen suficiente articulación y rango de movimiento de la cadera ipsilateral para completar el registro óseo; la presencia de metal en la pierna operatoria, posiblemente creando artefactos en la tomografía computarizada que podrían reducir la precisión y afectar negativamente el plan operativo; y el nivel de comodidad del cirujano con el uso del Mako. En este momento, solo ciertos implantes son compatibles con el robot Mako, por lo que se deben considerar cuidadosamente factores adicionales. Incluyen mala calidad ósea que afecta la estabilidad del implante; mala integridad de los tejidos blandos que impide la restauración de una articulación estable con los implantes compatibles; y el tipo y la importancia de la deformidad general en la rodilla, incluidas las contracturas de flexión y la alineación fija varo/valgo.
La osteoartritis es la enfermedad articular más común. Se estima que el 37,4% de los adultos mayores de 60 años tienen evidencia radiográfica de artritis. 1 Se proyecta que el número proyectado de reemplazos totales de rodilla, según la Oficina del Censo de los Estados Unidos, aumentará en 3.5 millones de cirugías para 2030. número arábigo
La ATR, en general, ha producido excelentes resultados clínicos en las últimas décadas. 3, 4 No obstante, hay margen de mejora. Los estudios muestran una mala alineación del eje mecánico de más de 3 grados en hasta el 31,8% de los TKA convencionales frente al 9% de los TKA asistidos por computadora. 5 Uno de los factores más importantes que determinan los buenos resultados clínicos es la colocación adecuada de los componentes. 6, 7 En un estudio cadavérico, los cortes óseos finales promedio y la posición de los componentes fueron 5 y 3,1 veces más precisos con Mako TKA en comparación con los controles convencionales de TKA. 8 Por lo tanto, la artroplastia total de rodilla asistida por robot (RATKA) puede aumentar la precisión de los cortes óseos y la colocación de componentes.
En otro estudio cadavérico, la tecnología Mako para RATKA demostró una buena protección de los tejidos blandos, incluyendo la ausencia de lesiones en el tendón LCL, MCL, PCL o rótula. Este estudio también demostró que la subluxación tibial y la eversión rotuliana no eran necesarias para una visualización adecuada mientras se realizaban cortes óseos. 9
Aunque existen otros sistemas asistidos por robot, el sistema Stryker Mako se utilizó en esta presentación de casos con un implante de triatlón Stryker. El implante total de rodilla Triathlon ha demostrado una excelente supervivencia del 99% en un estudio de seguimiento de diez años. 10 Se han implantado más de 2 millones de rodillas de triatlón, lo que demuestra que es un sistema fiable que ahora es totalmente compatible con la tecnología asistida por robot Mako. 10
El amplio espectro de enfermedades en las rodillas artríticas y la anatomía única de cada paciente pueden presentar desafíos para el cirujano al realizar una ATR. La tecnología RATKA permite al cirujano tomar decisiones intraoperatorias utilizando un bucle de retroalimentación en vivo basado en plantillas preoperatorias basadas en TC 3D que permite pequeños ajustes en los cortes óseos y la colocación del implante. La tecnología del brazo robótico, que incluye retroalimentación en tiempo real, permite al cirujano equilibrar la articulación en función de la tensión de los tejidos blandos antes de realizar cortes óseos. En un estudio de un solo cirujano, Marchand et al . analizaron los datos de equilibrio intraoperatorio y resección ósea para más de 100 rodillas. 11 Observaron que todos los planes preoperatorios se ajustaron intraoperatoriamente, independientemente del grado de enfermedad artrítica o del tipo de deformidad de rodilla. Los ajustes intraoperatorios fueron capaces de lograr el equilibrio dentro de una diferencia de 1 mm entre los huecos medial y lateral en flexión en el 97% de las rodillas y la extensión en el 100% de las rodillas. 12 Además, la mayoría de las rodillas no requerían liberación de tejidos blandos para el equilibrio. 12 La capacidad de predecir el equilibrio articular y ajustar la posición de los componentes antes de realizar cortes óseos da como resultado una técnica de resección equilibrada aumentada con tecnología asistida por robot para mayor precisión.
Otro factor para determinar buenos resultados clínicos en la cirugía de ATR es el uso de tamaños de implante adecuados. 13 Aunque no siempre es necesario, la planificación preoperatoria puede ayudar a estimar el tamaño adecuado del implante. 14 La tecnología RATKA se basa en una plantilla preoperatoria basada en TC 3D que permite al cirujano predecir con precisión el tamaño del implante. Bhimani et al . analizaron a 54 pacientes consecutivos que se sometieron a RATKA con el sistema Mako RATKA que proporcionó una plantilla de tamaño de implante preoperatorio. Los cambios en el tamaño del implante se realizaron intraoperatoriamente en función de factores como evitar la muesca femoral, evitar o minimizar el voladizo del implante y maximizar el contacto cortical. El estudio demostró que el software predijo el tamaño exacto de los componentes del 96% de los componentes femorales y el 89% de los componentes tibiales, y ninguna plantilla estaba fuera de más de 1 tamaño. 15 Además, no hubo casos de muesca o voladizo del implante ni en el componente femoral ni en el componente tibial. 15 Otros estudios han demostrado que las plantillas del tamaño del implante tienen una precisión del 43,6% al 68% utilizando radiografías estándar, lo que explica que la práctica no es común. 16, 17
Al igual que con casi todas las nuevas técnicas quirúrgicas, hay una curva de aprendizaje con RATKA. Sodhi et al . evaluaron la curva de aprendizaje con RATKA y encontraron que un cirujano puede sentirse cómodo con la tecnología hasta el punto de no agregar ningún tiempo quirúrgico en unos pocos meses. 18
Algunos estudios han informado puntuaciones medias de dolor significativamente más bajas, mejores puntuaciones generales de la función física, mayor satisfacción del paciente y resultados clínicos, y puntuaciones más bajas de la articulación olvidada en pacientes con RATKA en comparación con la ATR manual convencional que utiliza una variedad de medidas de resultado informadas por el paciente. 19, 20 Aunque se necesitan estudios con resultados a más largo plazo y poblaciones más grandes con esta tecnología relativamente nueva, los resultados clínicos tempranos son prometedores.
El equipo especial utilizado en esta cirugía incluye el sistema Mako TKA de Stryker.
No tenemos nada que revelar.
El paciente al que se hace referencia en este artículo de video ha dado su consentimiento informado para ser filmado y es consciente de que la información y las imágenes se publicarán en línea.
Citations
- Dillon CF, Rasch EK, Gu Q, Hirsch R. Prevalencia de osteoartritis de rodilla en los Estados Unidos: datos de artritis de la Tercera Encuesta Nacional de Examen de Salud y Nutrición 1991-94. J Reumatol. 2006;33:2271-2279.
- Proyecciones de reemplazo total de rodilla y cadera de AAOS 2030. http://www.prnewswire.com/news-releases/total-knee-and-hip-replacement-surgery- proyecciones-mostrar-meteoricrise-by-2030-55519727.html. Consultado el 17 de septiembre de 2019.
- Jauregui JJ, Cherian JJ, Pierce TP, Beaver WB, Issa K, Mont MA. Supervivencia a largo plazo y resultados clínicos después de la artroplastia total de rodilla. J Artroplastia. 2015;30:2164-6. doi:10.1016/j.arth.2015.05.052.
- Registro Nacional Conjunto (NJR) para Inglaterra, Gales, Irlanda del Norte y la Isla de Man. 13º Informe Anual. Disponible en: https://reports.njrcentre.org.uk/. Consultado el 17 de septiembre de 2019.
- Sikorski GM. Cirugía asistida por computadora y alineación rotacional de la artroplastia total de rodilla. En Total Knee Arthroplasty 2005 (pp. 254-257). Springer, Berlín, Heidelberg.
- Hernigou P, Deschamps G. Pendiente posterior del implante tibial y el resultado de la artroplastia unicompartimental de rodilla. J Bone Joint Surg Am. 2004 Marzo;86(3):506-11. doi:10.2106/00004623-200403000-00007.
- Ulrich SD, Seyler TM, Bennett D, et al. Artroplastias totales de cadera: ¿cuáles son los motivos de la revisión? Int Orthop. 2008;32:597-604. doi:10.1007/s00264-007-0364-3.
- Hampp EL, Chughtai M, Scholl LY, et al. La artroplastia total de rodilla asistida por brazo robótico demostró una mayor exactitud y precisión para planificar en comparación con las técnicas manuales. J Cirugía de rodilla. 2019;32:239-50. doi:10.1055/s-0038-1641729.
- Bukowski BR, Anderson P, Khlopas A, Chughtai M, Mont MA. Resultados funcionales mejorados con la artroplastia total de cadera robótica en comparación con la artroplastia manual total de cadera. Surg Technol Int. 2016;29:303-8.
- Mistry JB, Elmallah RK, Chughtai M, Oktem ME, Harwin S, Mont M. Supervivencia a largo plazo y resultados clínicos de una artroplastia total de rodilla de radio único. Surg Technol Int. 2016;28:247-51.
- Marchand RC, Bhowmik-Stoker M, Scholl L, Rodriquez L. Técnica quirúrgica de resección equilibrada para la artroplastia total de rodilla asistida por brazo robótico. Reunión Anual de AOA, 8-12 de octubre de 2017, Adelaida, Australia.
- Marchand R, Bhowmik-Stoker M, School L, Rodriquez L. Técnica quirúrgica de resección equilibrada para la artroplastia total de rodilla asistida por robot. Resumen Reunión Anual de AOA, 8-12 de octubre de 2017, Adelaida, Australia.
- González MH, Mekhail AO. La artroplastia total de rodilla fallida: evaluación y etiología. J am Acad Orthop Surg. 2004;12:436–46. doi:10.5435/00124635-200411000-00008.
- Hernandez-Vaquero D, Abat F, Sarasquete J, Monllau JC. Fiabilidad de la medición preoperatoria con plantillas estandarizadas en artroplastia total de rodilla. Mundo J Orthop. 2013;4:287-90. doi:10.5312/wjo.v4.i4.287.
- Bhimani S, Bhimani R, Feher A, Malkani A. Precisión del tamaño del implante preoperatorio utilizando software de planificación previa 3D para la artroplastia total de rodilla asistida por robot. Reunión Anual AAHKS 2017. 2-5 de noviembre de 2017. Dallas, TX.
- Ettiger M, Claassen L, Paes P, Calliess T. 2D versus plantillas 3D en artroplastia total de rodilla. Rodilla. 2016;23:149-151. doi:10.1016/j.knee.2015.08.014.
- Trickett RW, Hodgson P, Forster MC, Robertson A. La fiabilidad y precisión de las plantillas digitales en el reemplazo total de rodilla. J Bone Joint Surg Br. 2009;9:903-6. doi:10.1302/0301-620X.91B7.21476.
- Sodhi N, Khlopas A, Piuzzi NS, et al. La curva de aprendizaje asociada con la artroplastia robótica total de rodilla. J Cirugía de rodilla. 2018;31:017-21. doi:10.1055/s-0037-1608809.
- Marchand RC, Sodhi N, Khlopas A, et al. Resultados de satisfacción del paciente después de la artroplastia total de rodilla asistida por brazo robótico: una evaluación a corto plazo. J Cirugía de rodilla. 2017;30:849-853. doi:10.1055/s-0037-1607450.
- Clark G. Australian Experience Mako Robotic TKA. Reunión Anual de AOA, 8-12 de octubre de 2017, Adelaida.
Cite this article
Zarin JS, Barrazueta G. Mako artroplastia total de rodilla asistida por brazo robótico. J Med Insight. 2023;2023(214). doi:10.24296/jomi/214.
Procedure Outline
Table of Contents
- 1. Introducción
- 2. Posicionamiento del paciente
- 3. Abordaje quirúrgico
- 4. Preparación del hueso rotuliano
- 5. Colocación de la matriz ósea
- 6. Cementación rotuliana
- 7. Calibración del punto de referencia del robot
- 8. Eliminación de osteofitos
- 9. Equilibrio intraoperatorio de ligamentos y brechas
- 10. Osteotomía femoral robótica
- 11. Osteotomía robótica tibial
- 12. Ensayos y correcciones de implantes
- 13. Colocación final del implante y posicionamiento de verificación
- 14. Cierre
- 15. Observaciones postoperatorias
- Planificación Preoperatoria
- La tomografía computarizada preoperatoria proporciona un modelo óseo virtual que se puede usar para planificar cortes óseos, así como el tamaño, la alineación y la posición del implante utilizando plantillas de implantes virtuales en el software proporcionado.
- La alineación general de las extremidades se puede verificar con la rotación combinada de los componentes del fémur y la tibia y varo/valgo.
- Se pueden realizar numerosos ajustes finos en el software y luego editarlos con más información clínica y en tiempo real, incluida la cinemática de la rodilla y la tensión de los tejidos blandos intraoperatoriamente.
- Los puntos de referencia anatómicos se definen en la tomografía computarizada y se desarrolla un plan preoperatorio basado en el del especialista en productos Mako, quien lo presenta al cirujano para su revisión.
- El plan preoperatorio incluye tanto el grosor de la resección del fémur distal, el fémur posterior como el tamaño de la tibia proximal y el implante, la rotación / alineación y la posición.
- Preparar al paciente antes del quirófano
- Afeite la piel alrededor de la rodilla con tijeras.
- Paciente de preparación en quirófano
- El paciente se coloca en posición supina con un cinturón seguro sobre su torso y el lado operatorio cerca del borde de la mesa.
- Por lo general, se usa una protuberancia debajo de la cadera o un poste en el lado lateral de la cadera / muslo proximal para evitar la rotación externa natural de la extremidad y mantener la pierna lo más neutral posible. Elijo usar un poste lateral.
- Se coloca un torniquete no estéril en lo alto del muslo del paciente.
- Esterilizar
- La rodilla se esteriliza utilizando la solución de preparación quirúrgica y la técnica elegida por el cirujano. Froto previamente con un cepillo exfoliante de clorhexidina, seco la extremidad y luego preparo la pierna con la solución de Chloraprep.
- No incluyo el pie en la preparación quirúrgica, pero uno puede elegir hacerlo.
- Cortina
- El paciente se cubre de la manera deseada por el cirujano para una ATR.
- Las cortinas en el borde del lado operatorio de la cama no deben ser más que una sola capa de drapeado sobre la barra lateral para colocar una abrazadera estéril en la barra lateral.
- Demasiadas cortinas hacen que sea demasiado grueso colocar una abrazadera sobre ellas en la barra lateral.
- Configurar el posicionador de piernas
- Hay un posicionador de piernas proporcionado por Mako que está unido a una abrazadera estéril en el riel lateral operativo. El posicionador incluye un riel de carbono estéril, una base que es ajustable y se desliza hacia arriba y hacia abajo del riel, y una bota para poner el pie. Elijo no usar la bota y en su lugar colocar el pie en la base.
- Configurar robot
- El robot, la torre, el monitor y el software Mako son configurados y posicionados por el especialista en productos Mako.
- El robot entra desde el lado operativo y la cámara se encuentra en el lado opuesto. La cámara debe tener una línea de visión directa a la rodilla operatoria donde se colocarán las matrices. El brazo robótico es cubierto y ensamblado por el técnico de fregado estéril. El especialista en productos Mako también trabaja con el técnico de limpieza para registrar el robot y sus herramientas estériles antes de la cirugía.
- Realice el tiempo de espera quirúrgico de la manera estándar específica del sitio
- El especialista en productos Mako confirma el nombre del paciente, la identificación del paciente, el lado operatorio y el sistema de implante con el cirujano.
- Se puede usar anestesia general o regional. Como complemento, los bloqueos nerviosos del canal femoral o aductor se pueden usar antes o después de la operación. Se administran antibióticos profilácticos. La pierna se puede exangular usando un Esmarch o gravedad levantando y sosteniendo la pierna durante 30 segundos o más. Utilizo la exanginación por gravedad e inflo el torniquete típicamente a 275 mmHg.
- Incisión cutánea en la línea media
- Se realiza una incisión en la piel de la línea media desde el borde superior del tendón del cuádriceps hasta el aspecto inferomedial del tubérculo tibial con la rodilla flexionada. La disección aguda se lleva hasta el nivel de la cápsula.
- Artrotomía medial
- Se realiza una artrotomía pararrotuliana medial. La rodilla se extiende y la almohadilla de grasa se libera, la rótula se everta y la rodilla se flexiona nuevamente. Se confirmó que nuestro paciente tenía enfermedad articular degenerativa tricompartimental en etapa terminal de espesor total que predominaba medial y patelofemoral. Los osteofitos se dejan en su lugar para permitir un registro óseo preciso con el brazo robótico.
- Resección del LCA
- El LCA se reseca fuera de la muesca femoral y las inserciones de la tibia. Utilizo una rodilla estabilizadora posterior, por lo que el LCP también se retira de la muesca.
- Resurgiendo
- Elijo recubrir la rótula en cada TKA. Hago esto antes de los cortes femorales y tibiales. La rótula de este paciente medía 24 mm de grosor, así que resequé 10 mm para que coincida con el grosor del botón de rótula.
- Colocación de implantes
- Se consideró apropiado un botón de rótula de tamaño 32 y los orificios están perforados en este punto. La irrigación por pulso se utiliza para limpiar la superficie cortada de la rótula y el implante real se cementa en su lugar y se sujeta firmemente. Se deja que el cemento se endurezca durante el resto de la preparación de la rodilla. Cemento todos los implantes de rótula.
- Insertar pines femorales para Mako
- Dos pasadores de perforación de 4,0 mm se fijan a la metáfisis femoral distal.
- Insertar clavos tibiales
- Dos pasadores de perforación de 4.0 mm se fijan a la metáfisis proximal de la tibia.
- Colocar matriz tibial
- Ajuste las matrices para que sean visibles por la cámara sin obstrucciones. La cámara también puede ser ajustada por el especialista en productos Mako para que ambas matrices sean visibles a lo largo del arco de movimiento de la rodilla.
- Colocar matriz femoral
- Colocar puntos de control femorales y tibiales
- Deben colocarse en hueso duro y lejos de futuros cortes óseos. Coloco el punto de control del fémur en el epicóndilo medial y el punto de control de la tibia en la diáfisis proximal anterior. Las ubicaciones de los puntos de control se registran utilizando la sonda contundente.
- Centro de cadera
- La cadera del paciente se circunduce continuamente y en diferentes patrones hasta que la barra de progreso alcanza el 100% en el software.
- Malleoli
- La sonda roma se utiliza para identificar el centro del maléolo medial y el centro del maléolo lateral. Una vez que la punta de la sonda se coloca correctamente en cada maléolo, la computadora registra los puntos.
- Registro
- El registro de fémur y tibia consta de muchos puntos para cada uno que se muestran en el monitor por el software basado en la tomografía computarizada. Se utiliza una sonda afilada para registrar cada punto del fémur que corresponde a la imagen virtual. No es necesario que la ubicación coincida exactamente con la imagen virtual, pero debe estar razonablemente cerca.
- La sonda afilada se utiliza porque los puntos de registro deben recogerse en el hueso, no en el cartílago, por lo que la sonda afilada puede penetrar cualquier cartílago para llegar a la superficie ósea.
- Es importante no penetrar en la superficie ósea.
- Si un punto está enterrado bajo un osteofito y es demasiado difícil acceder, elija un lugar cercano en el hueso.
- Luego se muestra una cantidad menor de puntos de verificación más grandes en el monitor que deben recolectarse y emparejarse tanto en el fémur como en la tibia.
- Una vez que el fémur y la tibia están completamente registrados, elimino todos los osteofitos.
- Resección medida vs equilibrio de la brecha
- El sistema Mako le permite elegir entre un flujo de trabajo de resección medida y un flujo de trabajo de equilibrio de ligamentos (o equilibrio de brechas).
- Utilizo una técnica de resección medida.
- La mecánica de la rodilla, incluida la flexión de la rodilla, el varo / valgo y la rotación, se muestran en la pantalla y se actualizan en tiempo real para corresponder con la posición de la rodilla.
- Primero, llevo la pierna a la extensión y observo cualquier contractura de flexión o recurvatum.
- En este caso, la rodilla tenía una extensión completa con una alineación en varo de 8 grados, que era laxa y podía corregirse más allá de neutral a 1 grado de valgo.
- La rodilla estaba un poco laxa para el varo y el valgo durante todo el arco de movimiento, así que sentí que estaba indicada una resección conservadora del fémur distal.
- Ajustes de software
- Se realizaron los ajustes apropiados en el software Mako para equilibrar y separar simétricamente.
- Hay un gran número de ajustes que se pueden realizar en el software para tener en cuenta la anatomía ósea y de tejidos blandos del paciente.
- El software midió los componentes femoral y tibial a un tamaño 3.
- La calidad ósea era buena, así que sentí que una construcción de ajuste a presión era apropiada.
- El orden de los cortes óseos se puede establecer según las preferencias del cirujano.
- Los cortes se realizan dentro de los límites virtuales establecidos por el robot para proteger los tejidos blandos.
- Estos límites se pueden ampliar si es necesario.
- Robot de muelle
- Resección distal
- Resección del chaflán posterior
- Resección anterior
- Resección posterior
- Resección del chaflán anterior
- Revisar y limpiar las resecciones
- Una vez que se hacen los cortes, coloco un esparcidor laminar en la articulación, lo que me permite visualizar la rodilla posterior donde elimino cualquier remanente de menisco, remanente de LCP y osteofitos posteriores.
- Resección medial
- Resección lateral
- Inyecte Marcaine
- En este caso, la rodilla se probó con un inserto de polietileno de 9 mm.
- La rodilla tenía un retraso de extensión de 10 grados, que pude corregir con sobrepresión a 0 grados.
- La rodilla se flexionó a 125 grados con la gravedad.
- Sentí que, en general, la estabilidad varus/valgus era ajustada a lo largo del arco de movimiento.
- Decidí resecar 1 mm adicional de la tibia.
- El brazo robótico fue traído de vuelta para hacer la resección adicional.
- El brazo es capaz de guiar una resección de alta precisión, despegando exactamente 1 mm más en la misma alineación mecánica que la resección anterior.
- La rodilla fue probada de nuevo. Ahora, la mecánica fue mejorada.
- La rodilla llegó a la extensión completa y se flexionó a 130 grados con la gravedad.
- Era estable a varus / valgus y no demasiado apretado.
- La rótula rastreó centralmente.
- El brazo robótico se retira del campo.
- Se perforaron los orificios femorales y se realizó el corte de caja para el componente femoral estabilizado posterior.
- El punzón de quilla se utilizó en la rotación de la tibia y se perforaron los 4 pequeños orificios.
- Colocación de la placa base tibial
- La placa base tibial de tamaño real # 3 se impactó en su lugar.
- Colocación del componente femoral
- El componente femoral PS de tamaño real # 3 se vio afectado en su lugar.
- Ambos componentes tenían una excelente estabilidad intrínseca con casi el 100% de contacto óseo.
- Inserción del revestimiento
- El revestimiento de polietileno de 9 mm se consideró apropiado e impactó en su lugar.
- Se lleva a cabo un riego copioso.
- El torniquete se desinfla y la hemostasia se obtiene mediante electrocauterio.
- Cierre de sutura en capas
- Cierro la artrotomía con la sutura #2 Quill .
- Luego uso una sutura 0 Vicryl para cerrar una capa de tejido profundo.
- Uso 2-0 Vicryl por vía subcutánea.
- Uso 3-0 Monocryl subcuticularmente.
- Se aplica un vendaje estéril y se permite que el paciente se despierte de la anestesia.
Transcription
CAPÍTULO 1
Hola, chicos. Soy el Dr. Jeffrey Zarin. Vamos a realizar un brazo robótico Mako artroplastia total de rodilla asistida hoy, y una de las cosas que iremos más es cómo usamos la tecnología informática planificar preoperatoriamente la cirugía, que es uno de los beneficios del implante relacionados con esta técnica. Así que siempre que Haga una de estas operaciones, el – se genera un modelo 3D del paciente utilizando la tomografía computarizada, y genera el tipo de tres puntos de vista de la hueso femoral y tibial. Y somos capaces de manipularlos, usando la computadora para tener una evaluación de la anatomía del paciente. Así que en este paciente, la artritis predominante es en el compartimento medial. Es una rodilla izquierda, y hay un gran medial osteofito que se puede ver aquí – Y tendremos que tener eso en cuenta consideración como parte de la operación. Los números que ves en la pantalla representan La alineación y el hueso resección en relación con cómo vamos a planificar la cirugía, y así el inicial La fase del proceso de planificación es simplemente dimensionar los implantes adecuadamente para que coincidan el hueso en un tipo de técnica de resección más medida. Luego, durante la cirugía, Podrás ver cómo somos capaces de utilizar la tensión del ligamento y La cinemática en el activo – o los ajustes en vivo que se pueden hacer en función de sobre la anatomía específica del paciente relacionada con su artritis. Así que esto es un – esto es el punto de partida, para luego usar la tecnología informática, Somos capaces de colocar un implante. Este utiliza un sistema de rodilla Stryker de triatlón Ese es el único implante actual para esta tecnología e instrumento. Así que en base a esto, vienen en múltiples tamaños, Pero la talla 3 es la que parece ajustarse al hueso apropiadamente. Y esta es una posición preliminar, por lo que esto permite una presentación virtual de donde estarán las resecciones óseas. Así que sin los implantes, tengo una sensación de en el – en los tres – vista coronal, sagital y flex de rodilla, soy capaz para ver dónde van a estar las resecciones para permitir una posición precisa del implante. Así, por ejemplo, Esta rodilla parece que va a tomar un poco demasiado hueso anteriormente, para que pueda mover el objetivo y luego flexionar la rodilla o extender la rodilla para adaptarse la posición del implante. Esto sería entallar el fémur anterior A esta cantidad de flexión, entonces: así que lo estableceré donde estará. El brazo robótico da alertas para si tengo demasiada flexión o extensión combinada. Ahora mismo, con el 6 grados de flexión y 3 grados de pendiente, hay demasiado combinado, así que Quiero retroceder eso a unos 5 grados. Y entonces potencialmente podemos Anteriorizar un poco el implante, y eso hará que sea mucho más limpio y cercano Resección al implante. Éste es un acceso mecánico de 0 grados para el que estamos configurando, pero este paciente tiene Una alineación varus que podemos visualizar en las radiografías preoperatorias. Y seremos capaces para adaptar esto, pero por lo general voy a quitar un grado de varus de la tibia para socavar parte del hueso esclerótico medialmente – y a veces esto necesita a ajustar. Así que finalmente, reviso mediolateral con el implante. Si Si subiera un tamaño en el implante, se puede ver cómo está sobresaliendo en la esquina aquí, y puedo verificar posteriormente – y está sobresaliendo posteriormente. Así que creo que el tamaño 4 es demasiado grande, así que vamos a desventaja a el 3, que da una apariencia mucho mejor posteriormente. Así que ahí puedes ver hay osteofitos posteromediales y algunos osteofitos posterolaterales Eso podría afectar la brecha y el equilibrio de la rodilla. Luego, una vez preliminar se selecciona la posición del implante, luego hay una vista basada en TC. Así que centrándome en la tibia aquí, reviso y me aseguro que el implante va a ser justo en la mitad del hueso. Suelo poner unos pocos grados de pendiente en la tibia a pesar de usar una construcción estabilizada posterior porque esto el sistema puede tolerar eso, y siento que coincide un poco con la anatomía del paciente más exactamente. Y el grado 1 de varo aquí es mantener el implante tibial justo en el centro del canal tibial, así que creo que será muy razonable. Y luego el último está revisando las placas base, así que mirando el placa base, nada sobresale, todos los componentes parecen ser apropiados, y Se establece esencialmente en 0 grados relativo al borde medial de el tubérculo tibial. Esto se puede ajustar durante la cirugía. En el lado femoral, Primero verifique para asegurarse de que No va a haber una muesca anterior. Así que el – el implante se alinea muy bien y coincide con el hueso anterior nativo del paciente, y medialmente, el contorno del radio de arco único de este implante parece coincidir con el paciente muy bien. Lateralmente, porque es un implante simétrico, Por lo general, hay algo que sobresale o metal extendido en el lado lateral, lo cual es muy típico debido a la asimetría de la anatomía nativa. La última parte es que compruebo la rotación. Esto permite la colocación de la líneas del eje transepicondilar y de los ejes condilares posteriores, y así por lo general el El eje posterior está a 3 grados de la rotación interna en relación con el eje transepicondilar, Pero en esta rodilla, en realidad están muy cerca. Y entonces, lo que trato de hacer es imitar la tróclea, que sería la línea lateral blanca, con el implante, así que como sigo el línea rosa con la tróclea verde metálica, Eso es muy bien emparejado. Así que cualquier El ajuste a eso ocurriría durante la cirugía como parte del equilibrio de la brecha de flexión. Y por último, el – mirando el equivalente de AP, esto se ve y se asegura de no hay voladizo mediolateral, y como venimos anteriormente, el anterior La brida no sobresale en el canalón lateral, que se ve muy cerca pero bastante bueno. Entonces, lo último es asegurarnos de que nuestra resección Los números tienen sentido, por lo que estamos tomando actualmente sobre A 8,5 mm del fémur distal, que es un poco demasiado para mí. Así que normalmente me gusta tomar entre 6 y 7, así que he destalizado eso para estrechar la brecha de flexión, y si nuestra brecha de extensión es estrecha, es Muy fácil con el brazo robótico simplemente volver a planificar esto para ser levantado o Bajado. Lo mismo ocurre con la posición anterior y posterior del componente femoral. 8 mm es un corte femoral medial bastante razonable. Es muy simétrico aquí. Ella no tiene mucho más colgante del cóndilo femoral medial donde, que generalmente hay una resección más grande medial que lateralmente. Si resulta que no estamos lo suficientemente rotados externamente, puedo Pínselo aquí, y podemos rotarlo externamente para llevarlo a un Posición diferente, pero obviamente, Eso afectará nuestra resección anterior. Así que probablemente solo lo haré Comience con esto donde lo teníamos antes: tal vez uno más en rotación externa - y luego haremos ajustes en vivo durante la operación en función de cuál es la brecha Espectáculos de equilibrio. Y ese es más o menos el estándar Configurar para planificar la cirugía. Puede haber ajustes durante la operación, dependiendo de qué sucede con los huecos que se hacen en esta pantalla, y verás Durante la operación A medida que medimos los huecos en la esquina inferior derecha de La pantalla realmente dará mediciones objetivas de la brecha de extensión y flexión medial y lateralmente, y haré ajustes basados en la clínica sensación de la rodilla, así como cómo siento que se va a liberar durante la cirugía. Una vez que comenzamos, Es un enfoque parapatelar medial estándar a través de un incisión en la línea media. Inicialmente, cuando estaba haciendo estas cirugías, la matriz para El brazo robótico requería un pasador extraarticular en la tibia o en el eje femoral, pero hemos podido Modifique la posición de la matriz para que Verás que los pines están completamente dentro del incisión en la línea media de la rodilla – Y es una incisión bastante estándar. Una vez que se completa el enfoque, primero preparo la rótula. La resección de rótula es una resección a mano alzada para mí, y reseco 10 mm, que es equivalente al grosor del implante, y Tome esa decisión durante la operación. Cemento el botón rotuliano en su lugar. Creo que los botones rotularios cementados de 3 clavijas tienen una complicación baja perfil, por lo que no he estado usando un press-fit, pero este paciente tiene buena calidad ósea y es relativamente joven y activo, y por eso he estado prefiriendo utilizar los diseños de implantes de ajuste a presión sin cementarlos en gran parte porque la resección por El brazo robótico es muy simétrico, muy consistente. Y así el contacto para el el hueso es bastante bueno, y he tenido un buen éxito con estos implantes. Así que la rótula se reseca, El cemento se mezcla, los orificios se perforan y el La rótula se sujeta en su lugar. Primero e inicialmente, mientras el cemento se está endureciendo, El resto de la rodilla está preparada. Hay dos clavos colocados en el femoral metáfisis y dos en la metáfisis tibial que verá que las matrices son fijada a, y luego el siguiente paso es registrar el hueso con el brazo robótico y el procesador central robótico. Primero, hay un arco de movimiento del cadera para crear el centro de la cadera, y luego el medial y lateral Malleoli en el tobillo están registrados. Esto dará un eje mecánico de la extremidad y se puede validar con el robot Tomografía computarizada que se realiza antes de la operación para permitir una evaluación de alineación intraoperatoria en vivo. Una vez hecho esto, sabemos va a ser una talla 3 aquí, así que necesito registrarme del hueso al brazo robótico para que coincida con la plantilla. Así que hay un Sonda pequeña que se utiliza para tocar entre 30 y 35 puntos en el fémur y tibia que registrarán el hueso en la plantilla robótica, Y eso va razonablemente rápido. Una vez hecho esto, Luego se lleva a cabo el equilibrio. Así que los osteofitos se eliminarán después del registro, y luego el equilibrio de la brecha se evaluará como parte del arco de movimiento de la rodilla. Entonces, una vez que se lleva a cabo el registro, el brazo robótico es llevado al campo, y luego se utiliza para: Usando la retroalimentación háptica, el brazo robótico con el La sierra adjunta a ella hace las resecciones conmigo guiándolo. Hay a veces algunos ajustes menores con esto. Porque los pines están muy cerca en el campo, a veces tengo que posicionar la pierna rotado externa o internamente para permitirlo estar dentro del campo del brazo. Encontré que esto permite para minimizar el número de veces La base de las necesidades del brazo robótico para ser trasladado, Porque cuando el pie está en una posición muy rígidamente fija, Tengo que conseguir que el brazo coincida con él, donde puedo mover la pierna. Con frecuencia, tengo que rotar externamente la pierna un poco, que no es tan grande de Un trato, pero el brazo robótico puede adaptarse a la posición de La pierna en el espacio basada en las matrices. Y así verás cómo eso va cuando hacemos la cirugía para hacer que el brazo robótico sea accesible a las resecciones. No sabe dónde están los tejidos blandos, así que tengo un número limitado de retractores que coloco, pero verás que no tiro en los retractores o tienen que ganar exposición muy agresiva o extensa de la rodilla – lo suficiente para dejar que el La hoja de sierra llega a donde necesita llegar. A veces la esquina anterolateral de la tibia es difícil de alcanzar, y de vez en cuando, tengo que Mueva el robot para obtener esa área sin poner en peligro el tendón rotuliano, pero de lo contrario La mayoría de las resecciones suelen ser bastante suaves. Una vez que las resecciones estén hechas, entonces Coloque implantes de prueba. Paso algo de tiempo Limpieza de la cara posterior de la rodilla, y hago una construcción de estabilización posterior para la mayoría de mis rodillas, así que Haremos parte de la preparación de tejidos blandos, y luego Probaré la rodilla. Una vez que probemos, tendré Retroalimentación con el brazo robótico en cuanto a dónde está el equilibrio, dónde está la alineación, y cómo nos sentimos, y luego, ocasionalmente, Tendré que hacer un ajuste con el brazo robótico para restablecer una de las resecciones. Con frecuencia, no lo hago, pero veremos cómo va. Una vez hecho esto, entonces el trabajo del brazo robótico está completo, la preparación está hecha, Y así el resto de la cirugía es Estándar para preparar el hueso para aceptar los implantes de ajuste a presión. Hay una fase de preparación para perforar los orificios y crear un corte de caja, y luego hay una quilla Golpe en la tibia. Una vez hecho esto, Los implantes reales se ven afectados. Su fijación será evaluado, Y luego se insertará el polietileno real. Entonces es un Cierre estándar. Todos los pines y la matriz robótica deben eliminarse obviamente antes del final de la cirugía, y se aplicará un vendaje estándar.
CAPÍTULO 2
Gracias. Así que esto es algo propiedad de Stryker. Bien, ahora tomaremos la gran herramienta F. Veamos. Ese se ve bien. Bien, y luego esta cosa se adjunta. Que tiene una abrazadera deslizante que sujeta el pie. Bien. Luego pondremos uno de estos aquí. Abrazar a Courtney. Genial, todos allí, Bien, y luego solo necesitaremos tu balón de fútbol. Bien. Esa es nuestra configuración.
CAPÍTULO 3
Bien. Listo – incisión estándar en la línea media. Tijeras de mayo. Gracias. Gelpi. Y un Schnidt. Agarra el Bovie, Courtney. Todo esto es estándar abordaje anterior. Lo hago en flexión porque creo que ayuda crear un poco de tensión en los tejidos, y así no tengo que crear Una solapa tan grande – socava una solapa tan grande medial y lateralmente – hasta el fin. Tomaré otro Gelpi. Gracias. Tomaré una esponja y un Bonney. Voy a esponjar estas pequeñas cosas. Otro Bonney. Simplemente levante suavemente un pequeño colgajo medial aquí. Este paciente tiene un IMC de aproximadamente 35, por lo que es posible que tengamos que crear un Un poco más de solapa de lo habitual. Bastante bien, un poco aquí. Bien.
Entonces, una artrotomía medial estándar justo en el borde medial. Es posible que necesitemos tomar un poco más de piel. Ya veremos. Está bien, tomaré un cuchillo profundo ahora, por favor. Gracias. ¿Listo con la succión? Wooh – gran derrame! Parecía líquido claro. Creo que daremos un poco más de incisión. Cuchillo regresando. ¿Puedo tener una Z, Ally? Así que ella tiene una rodilla vara, que tiende a ser más apretado medial que lateral. Así que normalmente anticiparé por... posponiendo - liberando un poco más medial rodilla. Si puedes quedártela Mapear hacia abajo, me ayudará. Así que vamos a crear un pequeño colgajo medial aquí. Y eliminaremos esta escisión del menisco medial anterior. Todo este es un enfoque estándar para mí para una rodilla. reemplazo. Elimino el menisco en etapas. Tomo el tercio anterior aquí cuando puedo verlo. Entonces usaremos este pequeño osteotomo para crear un pequeño espacio debajo de aquí. Un poco de chupar en esa esquina medial allí, Courtney, gracias. Simplemente nos burlaremos suavemente de eso. Entonces solo liberaré estos pequeñas fibras profundas del MCL. Está bien, y un cuchillo profundo. Arrepentido. Así que ahora en extensión, libero la almohadilla de grasa anteriormente. Puedes sacar a ese Gelpi de allí, Courtney. Sí, puedes quitarte ese superior. Y eso se aclarará adecuadamente. Y luego flexionaremos esto de nuevo. Ahí va nuestra exposición. Y luego recuperaremos la Z. Así que despejo una pequeña cantidad de la membrana suprarrotuliana. Parece un 3. Tomaremos un cuchillo profundo, Ally. Gracias. Y limpiaremos este poco de almohadilla de grasa infrapatelar. Ann Marie, ¿puedes poner el torniquete hasta 300? Ella es un poco hipertensa, y no se sostiene. Si su presión vuelve a bajar, hágamelo saber, y luego moveré el torniquete hacia abajo. Y estamos teniendo un golpe aquí. Ahora el ACL está aquí.
Puedes verlo, así que desafortunadamente no sirve de nada a nosotros en un – en una rodilla total actualmente. Así que voy a resecar el ACL. La rótula es la primera, Ally, así que lo haremos a continuación. Como puede ver, ella tiene artritis tricompartimental. Aquí no queda cartílago. Ella es no en la rótula, y Entonces, y hay un gran osteofito medial aquí. Así que– Y hay un gran osteofito tibial, pero como parte de esto enfoque, no quieres reseccionarlos, Porque los necesitamos como puntos de registro para el brazo robótico, y eso es diferente de lo habitual.
CAPÍTULO 4
Así que ahora Voy a hacer la rótula a continuación. Dos ganchos triples, por favor. Gracias. Hacemos la rótula, ya que esto va a ser un – esto será una rodilla de ajuste a presión para el fémur y la tibia, pero yo – Bonney, por favor – No he adoptado del todo la tecnología de rótula de ajuste a presión, así que me gusta cementar la rótula todavía. Simplemente reseque un poco de esta membrana suprarrotuliana aquí. Bien. 22 mm de espesor, Así que las rótulas son de 9 o 10 mm. Voy a Paso a mi izquierda aquí. Veamos la hoja de sierra ancha, por favor. Así que vamos a Dispara para un residuo de espesor de 12 mm. Todavía es un corte a mano alzada en mi mano. No está mal, veamos cómo lo hice. Se siente un poco grueso para mí, todavía. Sí, necesita otro milímetro. 32 Apuesto. Eso se siente mejor. Sí, está bien. Puedes sacar el tenedor de pepinillos. Así que aquí hay una rótula de 32 mm. Eso parece correcto para que coincida con su hueso. Bien. Adelante, Courtney, taladra esos. Bien. Bien. Veamos el botón. Así que estábamos filmando para unos 23 o 24 mm de grosor. Que eso es justo en 24, así que se ve muy bien. Éste... Muchas gracias. ¿Puedo ver el rongeur, por favor? Simplemente despejaremos este borde. Jess, puedes mostrarme un botón rotuliano 32. Bien. Puedes abrir eso, junto con una bolsa de cemento. ¿Debo empezar a mezclar o... Sí, una vez que el botón está abierto, y tienes la pinza correcta lista. Además, necesitaremos los pines ahora para el brazo robótico, por lo que debe Haz dos cosas a la vez. Aquí tienes, Courtney... Si puedes hacer eso – el pasador largo en el taladro y la manga.
CAPÍTULO 5
Así que a continuación vamos a poner – aquí tienes, Courtney. A continuación, vamos a poner el pasador de taladro para el brazo robótico, que es uno de los pines de matriz. Veamos la manga larga. He estado poniendo esto dentro de la incisión, y así tiene que ir – Tiene que ir justo proximal a la tróclea. Podrás ver dónde está en un segundo. Veamos. Asegurémonos de que eso sea bueno. Otro. Muy bien. Y luego esta es una de las matrices para el fémur. ¿Tienes el destornillador azul? Así que puse esto temporalmente aquí para mantenerlo en su lugar, y luego Flexionaremos la rodilla hacia arriba. Chupa ahí, Courtney. Sí. Bastante bien, nuestro tendón cuádruple está bien. Así que tenemos que realizar múltiples tareas un poco, porque estamos trabajando en pines y en la cementación al mismo tiempo. Sí. Aquí, cambiaremos esto.
Bien, ahora veamos los pines tibiales. Así que estos dos pines tibiales van intra-articularmente, aquí abajo, debajo del tubérculo tibial, y los inclino un poco cuesta arriba. Y luego la manga.
Así es como se ve la matriz para el tibia, que es – esto es en realidad, técnicamente, la matriz pélvica. Y luego estableceremos esto aquí. Vaya, necesito inclinarlo un poco. Aquí vamos. Eso debería estar bien. Así que compruebo el ángulo de la misma porque la matriz robótica necesita ser capaz de ver estas cosas. Así que esto se establecerá aquí. Esto es en realidad usando la matriz de cadera. Nosotros no quiero que golpee su piel allí, así que tengo cuidado de asegurarme de que sea Solo cerca, así que se ve bastante bien. Veamos la matriz femoral ahora. Puedes pasármelo, Courtney.
Así que Este es el otro, que estableceremos aquí. Esto realmente me parece bastante bien. Ya veremos. Conseguimos que este tipo se atornille allí correctamente. Así que ahora el brazo robótico ofrece una pantalla de dónde se ven estas cosas.
Muy bien, mazo. Está bien, adelante. Dale 2 más. Aquí tienes. Ese es el punto de control femoral, y luego esto es el punto de control tibial. Estos– si no puedes conseguirlo, lo tomaré. Estas pequeñas cosas nos dan puntos validados por el – para el brazo robótico durante todo el caso. Está bien, adelante, Courtney. Sí, sigue adelante. Un par más, bien. Muy bien, así que eso es bueno. Déjame tener ese destornillador azul, el pequeño, otra vez. Solo quiero asegurarme. No quieres que nada se mueva.
CAPÍTULO 6
Bien, nuestra rótula está lista. Veamos el cemento, por favor, y ¿tienes un ¿Esponja de regazo mojada? Utilizo cemento de alta viscosidad para esto, porque nos permite tener esto cemento listo más rápido, y hago la parte de cementación del caso ahora porque Se endurecerá mientras hacemos el resto de la preparación. y acortar el tiempo quirúrgico – solo un pequeño truco. Bien, tomaremos la pinza. Gracias. Así que le daremos un poco Apretón preliminar. Ya veremos. Quítate el cemento. Vuelva a colocar la abrazadera. Asegúrese de que no haya piel atrapada. ¿Tienes un Schnidt? Gracias. Así que voy a chupar a ese pequeño, Courtney. Muy bien, uno más ahí mismo, pequeño. Sí, bien, está bien. Aquí tienes.
CAPÍTULO 7
Bien, muy bien. Ahora, ahora tenemos que establecer nuestro registro, así que voy a dar un paso a mi izquierda de nuevo. Bien, primero está el centro de movimiento de la cadera. Así que adelante, nada de baile hoy chicos. Entonces, a veces hacemos un pequeño baile durante esta parte, pero – pero La idea es flexionar y extender, rotar internamente-externamente, abducir, aducir y, a continuación, Centrará la cabeza. Y luego tenemos que decirle dónde... Eso nos da el punto proximal para nuestro eje mecánico. Y luego el El punto distal es nuestro tobillo, así que ese es el maléolo medial. Y luego el lateral Malleolus – es un poco subjetivo, pero creo que parte del error se cancela solo. Está bien, Jess, ese es bueno. Y luego tenemos que decirle dónde está el El punto de control femoral está aquí para más adelante en el caso, así que adelante. Muy bien, y luego aquí está el punto de control tibial. Bien, y luego, así que ahora esta es la parte de registro del hueso para la cirugía robótica. Así que ya he hecho la mayor parte de la exposición. Se ve Como muchos puntos, pero en realidad es bastante rápido. Así que solo quiero tocar el hueso con esto, y solo estoy siguiendo el patrón de cerca, pero no exactamente, Porque la idea es para dar esto tantos puntos en múltiples dimensiones. Jess, ¿borrarás ese? Ese pinchó en el hueso. Lo siento, sí, Eso es todo. Gracias. Así que uno perforó accidentalmente en el hueso. Sentí que atravesaba el hueso subcondral, y eso no será bueno para un punto porque la tomografía computarizada es basado en el hueso en sí y no en el cartílago articular. Así que en el medial lado de la rodilla aquí, donde esto es todo el camino hasta El hueso, estos puntos son geniales, porque no lo harán... No tengo que preocuparme que he perforado a través de cualquier cosa o le dijo al brazo robótico que soy más profundo que Realmente lo soy, que el hueso es realmente más profundo de lo que realmente es en realidad. Así que solo estoy trabajando para llegar aquí. Estoy– se nota que no soy perfecto en términos de ponerlos exactamente donde la cosa dice, pero es solo tratando de asegurarme de obtener un GA amplio – espectro de anatomía para registrar – y Estos son los osteofitos sobre aquí que no despegué, pero es crucial eliminar los posteriores porque van a afectar a la Equilibrio de la brecha de la rodilla – Pero al principio no puedes sacarlos. Y luego cuatro más solo aquí en la muesca, y luego veremos qué tan buen trabajo hice. Allí, así que veamos. Así que estamos buscando verdes y amarillos. Eso es genial, así que la mayoría de ellos: Esos puntos están justo donde el brazo robótico lo planeó. Así que ese es el cartílago. Tiene aproximadamente un milímetro de grosor, y si empujo hacia abajo, estoy justo en el hueso. Así que eso es bueno. Por lo tanto, esta es una verificación de validación. Esto está justo en el hueso, por lo que es bueno dentro de 1/2 – 1/10 de un – par de décimas de milímetro. Ese es justo en un osteofito medial. Este es aquí arriba en la esquina justo en el hueso. Éste Fémur superior anterior dentro de un milímetro. Puede ver en el TC cómo se mueve en el pequeña caja mientras me deslizo a lo largo del hueso, entonces. Y el último está en La muesca aquí, que está justo en esa pared medial – o en la pared lateral del lado medial, Y eso es todo para el fémur. Ahora vamos a llevar la tibia hacia adelante un poco, y tomaré esa sonda azul de nuevo gr – azul. Ahora exactamente lo mismo para la tibia. Solo vamos a tocar varios puntos aquí: y luego lo mismo. Ella es hueso sobre hueso aquí medialmente, así que estas cosas es bueno: bueno para el registro porque está bien encendido El hueso subcondral de donde la tomografía computarizada es. Luego nos encontraremos un poco con el frente aquí. Así que actualmente esta exposición no es más que tal vez un poco más proximalmente de lo que yo haría lo han hecho normalmente para permitir que ese par de pines proximales a: para retener el quad sin rasgarlo. Y luego aquí abajo. Así que no saqué ningún osteofito aquí abajo tampoco, y tenemos un par más en el frente aquí. Siempre hay hueso blando allí, así que tengo que tener mucho cuidado con pasar a través del tendón pero no del hueso – y luego abajo por el tubérculo tibial aquí. Haz un par yendo directamente hacia arriba. Está justo a través del tendón rotuliano, y el El último conjunto está aquí en la tibia medial. Veamos cómo lo hicimos. Bastante bueno, todos los verdes y amarillos. Una vez más, un rojo: me metí en el frente aquí, pero Eso todavía está dentro de la precisión del hueso. Así que lo estaré, no necesito rehacer ese punto. Luego anteriormente, en la tibia – Vaya. Lo siento, la sonda se perdió de vista. Aquí vamos. Y entonces Siempre tengo cuidado de asegurarme de que la sonda apunte hacia La pantalla de seguimiento – Ups. Uno de mis pines está justo donde quiere estar. Aquí vamos. Uno de esos pines está justo ahí: y luego uno más medialmente. Ahí mismo, bien. Eso es todo para nuestro registro. Tardó unos 3 o 4 minutos.
CAPÍTULO 8
Ahora, finalmente puedo sacar a todos estos osteofitos de aquí. Así que rongeur, por favor. Entiendo. Por lo tanto, ahora es crucial eliminar todos estos osteofitos a pesar de que En su rodilla no son muy grandes, así que no es un gran problema. Un poco lateralmente aquí - No está mal. Y luego este tibial del que tenemos que deshacernos. Así que vamos a tratar de aclarar un poco más de esto Veamos ese 3/8 curvo y un mazo. Por lo tanto, este es crucial. El MCL está justo aquí, y el osteofito está justo debajo de eso. Entonces, voy a quitar esto con cuidado. Despeja ese osteofito medial fuera de allí. Bueno, creo que se ve bastante bien.
CAPÍTULO 9
Muy bien, así que ahora tendremos una idea de cómo se ve nuestra rodilla. Da un paso a tu derecha, Courtney, Pero mantén los ojos en la rodilla si no te importa. Bien, entonces esta rodilla tiene una extensión casi completa. A veces tienen un contractura de flexión. Nosotros En realidad tengo un pequeño juego sobre eso, pero 1 grado – está en 4 grados de varo – 4 o 5 grados en neutro, y puedo Empújelo a unos 10 grados de varo. Así que eso – eso – así que ella tiene cierta laxitud lateral. ¿Ves eso? Ahora, medialmente, veamos qué pasa. Entonces, puedo Empújala en realidad en un poco de valgo, también. ¿Tienes las piruletas? Así que Hay bastante traducción Se puede ver en la rodilla aquí, que Yo llamaría a esto una rodilla floja. Y ella está sentada a los 16 años o – ve adelante y atrapa a esa, Jess, solo por diversión. Por lo tanto, nuestra brecha de extensión es un poco suelto o medial que lateral. Ahora, veamos el 3, 4 cucharas, porque Elegí esto para rellenar el defecto lateral. Así que yo, en reposo, ella tiene 16 años, 17 mm lateralmente, pero Puedo empujarlo a sobre, en realidad, no tanto. menos de lo que pensé que era va a ser. Entonces, voy a poner una de estas cucharas allí para tratar de abrir este lado lateral. Vea cuánto, vea que lo hace funcionar a 20. Eso es lo que sentí para mí. Entonces, ahora tengo una extensión máxima lateralmente y luego medialmente a medida que la tiro. Algo así mantenlo ahí, Jess. Captura ese. Entonces, eso es más preciso para sus brechas. Ella tiene un poco de rodilla laxa, así que cuando lo hice por mano, solo estábamos recibiendo 16 o 17, Pero en realidad estamos en el rango de 19, 20, lo cual está bien para mí. Eso es un poco flojo en la extensión. Así que ahora veremos qué flexión tiene antes de hacer cualquier ajuste. Así que tengo que Coloque la rodilla a 90 grados de flexión aquí. Poco – 89, 90. Osteotomo negro. Así que lo mismo: se ve mucho más apretado medial que lateral, Y, así que ahora tenemos que ver a qué nos vamos. Ser capaz de hacer lateralmente aquí. Entonces, el espacio lateral está sentado en 20, y puedo llevarlo a 21. Y medial – Puedo empujarlo a unos 16. Guarda ese. Por lo tanto, estamos apretados medial más que lateral, así que para arreglarlo, pero nuestro Los huecos no están tan lejos, así que si lo fijamos justo en el centro, porque vamos a necesitar externamente Gire el fémur ahora para arreglar el asimetría de brecha de flexión. Así que adelante, gíralo externamente, y haz uno más, Jess. Haz otro. Aquí vamos. Ahora, veamos qué puedo sacar de esta cosa. Así que se trata de... todavía no hay mucho cambio, ¿eh? Vamos a tener que ver si obtengo alguna liberación. Guarda esa, Jess. Así que estamos sentados en... mejoré un poco allí, pero eso me sorprende. Y todavía puedo Jack esto abierto, así que todavía estamos un poco abiertos – poco apretado medial en comparación con lateral. Ahora, tengo que decidir si quiero aceptar que 2 mm de diferencia o no. Ella tiene bastante traducción, yo estoy, así que soy un Pequeña H – vacilante. Mira, puedo hacer que obtenga 19 medialmente. Dudo un poco en Suelta el medial. Hagámoslo. Pin: fije la tibia lateralmente, y luego Dale un grado más de varo en la tibia, sí. Así que eso debería Acércalo mucho más ahora. Estamos dentro de – Sí, básicamente estamos incluso en extensión y 1 o 2 mm más apretado en flexión. Y ahora somos un poco demasiado grande, así que – así que he coincidió con nuestras brechas de extensión y flexión bastante bien, pero yo Pensamos que queremos distalizar el fémur 1. Allí, eso la lleva a 19. Y ahora tenemos que decidir. Su rodilla está un poco floja. Yo por lo general dispara para espacios de 18 mm, pero la pregunta es: ponlo un tic, Jess. Veo lo que eres después de allí. Así que eso es bueno porque 18 es casi lo correcto para un Polietileno de 9 mm, y tiene un poco de laxitud en el sistema aquí, así que creo que iremos con eso. De lo contrario, terminaremos necesitando un 10 o un 11. Entonces, eso me parece bastante bien. Estoy aceptando ese poco Un poco de laxitud posterolateral, lo cual está bien para mí biomecánicamente. Algunas personas lo harían Di que eso está realmente bien. Me gustaría mucho – Lo aceptaré cualquier día sobre la laxitud posterior medial. Entonces, revisemos nuestras resecciones y asegurémonos de que se vean bien. Entonces, eso fue bastante rápido. Es decir Muchos ajustes relativos, entonces, ¿qué hacer? ¿Tenemos? Tenemos– Solo estamos tomando una resección distal de 6 mm medialmente, que es en realidad lo que suelo resecar, Y estamos tomando 8.5 posteromedial. Así que estamos, estamos creando una brecha de flexión un poco más grande, y estamos – haga clic en el botón Línea de acceso condilar posterior. El – sí. Así que estamos... es interesante, porque nuestro PCA es en realidad paralelo casi a nuestro transepicondilar eje en este, que es un poco inusual. Por lo general, ese lado medial es más hiperplásico que este. Es más un fémur cuadrado y simétrico. Así que pienso... siempre podemos tomar más fémur distal, así que prefiero ser un poco apretado en la extensión que suelto. Y ella no tenía una contractura de flexión, así que creo que dejaremos esto, y si la rodilla sale con un contractura de flexión, tendremos que volver a resecar algún fémur distal, pero creo que estamos en Buena forma con esto. Quítese el implante por un segundo. Sí, creo que las resecciones en sí se ven bien. Creo que no veo ninguna resección excesiva. Estamos tomando 4 mm y 7.5 en la tibia, que es una resección un poco conservadora también, pero prefiero tomar otro milímetro Fuera si estamos apretados que agregar algunos si estamos sueltos. Y ese fito posteromedial Todavía no lo he eliminado, así que eso se aflojará. Está bien, puedes ir Volver a la otra pantalla. Creo que eso nos relajará un poco medialmente, lo cual es bueno, y Realmente no me importa tanto ese posterolateral, Simplemente siento que hay algo simétrico... Hay mucha traducción aquí y muchas lagunas. Entonces, no lo hago Quiero estar suelto, o pondremos un plástico grande. Muy bien, eso es bien.
CAPÍTULO 10
Traigamos el brazo robótico. ¿El cemento es duro? Sí. Perfecto. Bien, veamos. Necesito agarrar el mango aquí. Puedes dejarme ir. Está bien. Entonces, solíamos ser realmente anal acerca de configurar esto, pero ahora he aprendido a Solo una especie de globo ocular y asegúrese de la posición del brazo: eso es bueno, Jess. Detente ahí mismo. Asegurémonos de que puedo llegar a la tibia. Eso se ve bonito Bueno, y eso se ve bastante bien. Creo que estamos en el negocio. Algunos de ellos tienen Para ver con, sí, adelante. Algo de esto realmente solíamos ser muy Cuidado, y en realidad tienen – la sonda verde – En realidad tienen un programa para ayudarte a saber exactamente dónde está esta base en el espacio, pero: porque puedo mover el pie, generalmente puedo salir de él. Entonces, ahora solo tenemos que validar que nuestro punto de control no se haya movido. No lo ha hecho. Tenemos que validar que la hoja de sierra está donde el robot cree que debería estar, que esperemos que marque. A veces esto toma un segundo. Ahí está.
Bien, así que ahora El brazo robótico sabe dónde está la resección se supone que lo es. Parece que una resección relativamente conservadora, pero estoy... No me sorprende eso. Y así estoy Vamos a acercar esto al campo. Se involucra, y luego yo Apriete el gatillo muy suavemente – y el brazo robótico se moverá para crear el plano de la resección que queríamos. Así que ahora estamos en vivo. Estamos listos para rodar. Así que– Así que el disparador funcionará. Entonces, muevo mis ojos hacia adelante y hacia atrás entre el... el brazo robótico y la pantalla, Y esa barrera que es verde allá arriba es una barrera virtual que me protege de entrar en los tejidos blandos. Y, entonces, solo estoy tratando de Retire el verde del extremo del hueso, que es la resección. Su hueso es en realidad bastante duro, Así que ahí es donde nos estamos poniendo un poco nerviosos. Iniciar y detener cosas. Así que la resección anterior muy conservadora aquí. Ya veremos. Es posible que tengamos que tomar dos más fuera del fémur distal, dependiendo de cómo se equilibre su rodilla más tarde, pero lo hice a propósito, así que veremos dónde terminamos. Déjame, déjalo ahí, Jess. Solo quiero golpear el medio una vez más. Entonces, dejaremos que el brazo robótico se realinee. Bien. Solo quiero asegurarte con el ajuste a presión, Tenemos un muy, muy preciso Schnidt, por favor, una resección distal muy, muy precisa.
De acuerdo, puedes cambiar a la Resección posterior ahora. Entonces, ahora será la resección posterior. Esta hoja de sierra tiene una capacidad de corte lateral también, Así que a veces se obstruye con hueso. Entonces, ahora vamos a establecer nuestra resección posterior, así que vamos a Acércalo. Bien, el robot quiere que gire un poco externamente poco, así que agárrate a eso. ¿Lo tienes, Courtney? Con suerte, eso lo hará. Veamos. Sí. Así que eso lo mueve al plano. Con suerte, será feliz. Está cerca, pero no del todo. Es posible que necesitemos... Bien, bien. Es interesante. Tienes que tener una mano suave con esta cosa, y cuando lo músculo un poco, Me pelea. Solo voy a flexionar la rodilla un poco más. Creo que Necesito un ángulo un poco mejor aquí. Vamos a intentarlo de nuevo. Aquí vamos. Está bien, eso lo hará. Así que Esas son las resecciones posteriores. Entonces, vamos a cambiar a la otra hoja de sierra, que es uno recto. Vamos a retirar esto. El rastreador tibial no estaba siendo visto. Fue como intermitente – encendido y apagado y así ... Sí, por la razón que sea, Simplemente no estaba contento con ese poco. Mazo, por favor – solo voy a limpiar un poco de este hueso posterior. Su calidad ósea está bien para uno de estos. Entonces, ahora estamos cambiando a la hoja de sierra en línea recta. Vamos a tener que rotar externamente de nuevo, estoy seguro, para obtener esa resección anterior. Eso se ve bien. Está bien. Creo que estamos en buena forma aquí. Entonces, ahora vamos a re – poner una nueva hoja de sierra en el extremo de esta cosa, Y luego necesitamos revalidar la posición. Creo que estaremos bien. Podría Flexionarlo un poco más. Veamos la sonda verde. Entonces, tenemos para validar nuestro punto de control femoral aquí, y luego validaremos la posición de la sierra. Ahí está.
Entonces, ahora estableceremos nuestra resección anterior. Veamos. Puede o Es posible que no pueda desencadenar esto. No, necesitamos rotar externamente la pierna a poco más. ¿Tienes eso, Courtney? Sí. Bien, ahora vamos a tirar de la sierra – tenerla forrada. Muy bien, esa es la resección anterior. Ahora cambiaremos a la parte posterior – solo quédate donde estás, Courtney, si no te importa.
Solo voy a agarrar la succión aquí. Ahora la resección posterior, solo pon una mano aquí. Bien. Si viste las marcas rojas antes, no es significativo. Es solo la mitad un milímetro a un milímetro de sobre-resección, entonces. Muy bien, eso es todo, solo tienes para observar el tendón rotuliano.
El robot no sabe dónde está el tendón rotuliano, y luego la última es la resección anterior. Entonces, veamos. Eso se ve bien. Afortunadamente, mi matriz se está sosteniendo. Muy bien, muy bien – liberación. Entonces, eso es todo para las resecciones para el fémur.
Sin bloques de corte, sin agujeros de alfiler – Simplemente promulgó nuestro plan. Ahora algunas de esas resecciones son un poco Un poco inusual para mí porque esa resección distal es muy mínima. Y sabemos que obviamente no vamos a hacer una muesca, Así que hizo un buen resección del chaflán anterior allí y un buen anterior resección en sí. No tenemos que poner un Tapón óseo central porque no hay una guía intramedular. Veamos un mazo, por favor. En realidad, podemos mover esto de nuevo aquí. Despeja esa parte posterior. Sí, ¿quieres agarrar eso? Genial. Y tomaremos este, y luego probaremos una RC de 3 fémures. Entonces, aclaremos un poco de estas cosas. Muy bien, así que ahora veamos esto. Solo voy a hacer un cheque Y asegúrese de que todas nuestras resecciones estén bien, mazo, por favor. Por lo tanto, tiene un buen ajuste: alinea correctamente todas las partes. Se ve como aproximadamente 100% contactos óseos, así que yo – Una vez más, no hay razón para no presionar esta cosa. Así que creo que eso está bien. Así que necesito un rongeur. Hay un poco de cartílago aquí solo de un distal muy conservador cortar. Puede que tengamos que recortar el distal, que obviamente no es el fin del mundo. Es muy fácil de hacer. Sería solo esa secuencia de recortes de nuevo. Bien, veamos el tenedor de pepinillos. Así que he aprendido a conseguirlo, es tentador seguir adelante y cortar la tibia a continuación, pero he aprendido a limpiar estas cosas y obtener exposición tibial Primero. ¿Tienes un rastrillo a continuación, Ally? Bien, pon una mano allí, y pondremos un rastrillo aquí. Solo chupa en esa esquina. Quiero obtener el resto del medial menisco – Bonney, por favor. Ese fue un pequeño menisco posteromedial aquí. Sí, voy al frente, lo siento, Courtney. Esta es siempre la parte aterradora del caso: no quiero sacar el MCL. Rongeur, por favor. Usamos esto para despejar el resto de este menisco. Volveremos y obtendremos cualquier remanente más tarde. cuando despejo la rodilla posterior. Allí mismo, y luego tomaremos una Z y sacaremos el rastrillo. Así que la Z expondrá este lado tibial medial. Sí, Smith Peterson, hay un poco osteofito medial, por lo que liberaría – Esto nos va a aflojar un un poco más medialmente. Solo voy a limpiar algunas de estas cosas mediales, vaya. Está bien, y la celebración doblada. Luego pondremos Esto de este lado, no hay acción. Está bien, muy suavemente allí, antebrazo y una mano, solo Deslízate y observa la matriz femoral. Bonney, por favor. Estamos un poco apretados en el tendón rotuliano aquí, pero creo que vamos a dejarlo. Creo que el quad también está un poco apretado. Y un rongeur. Simplemente limpiando el menisco. Esto permite una extracción más fácil del hueso tibial una vez que se haga la resección, creo. No tiene que ser perfecto, solo saca algunas de estas cosas. De acuerdo, eso se ve bastante bien. Courtney, creo que estaremos bien. Tenemos que hacer nuestro Rotación lateral un poco, pero ya veremos. No está mal. Bien, entonces no tengo que poner ningún retractor importante en para esto. Simplemente traeremos el brazo robótico y la sierra de vuelta al campo, y ver la sonda verde. Así que Ahora tenemos que comprobar nuestro punto tibial, lo cual es bueno, y nuestro punto femoral – Me refiero a nuestra hoja de sierra, que a veces toma Un segundo, bueno, eso estuvo bien. Y luego estableceremos esto para que se alinee. Eso se ve bien. Es feliz.
CAPÍTULO 11
Así que tengo que tener mucho cuidado de no causar ningún daño a la tendón rotuliano con esto, porque la hoja de sierra no sabe dónde está el tendón, Así que comenzaremos con la resección medial. Vaya, mi mal, presioné demasiado. Vamos a intentarlo de nuevo. Así que tuve que sacarlo del campo y de nuevo, porque empujé demasiado fuerte sobre ese hueso esclerótico. Así que voy a tener cuidado y acercarme sigilosamente. Tan extremadamente esclerótico hueso medial allí – Solo tenía que tener mucho cuidado con eso resección para que no saltara ni sucediera nada raro. Ahora trabajaremos en el lado lateral.
Parte de esto es yo musculando el robot porque No tenemos suficiente excursión para golpear ese lado lateral. Creo que podría Solo haz eso con el ostetótomo, así que, porque es solo un poquito de anterolateral. Gracias, Courtney, eso fue muy útil. No lo creo porque No puedo obtener el ángulo allí lo suficiente, y su tendón es un poco apretado. Así que simplemente no quiero arriesgarme a lesionar el tendón, así que Lo haremos con un ostetótomo. Es solo un poquito en el frente que necesita romperse.\NMallet, sí. Ahí, eso es todo. Así que ahora un rongeur – así que eso debería liberar todo, Y simplemente pelaremos esto hacia adelante. Sí, fue una buena decisión. Podemos Termina con un 11 poly debido a esa versión, pero eso está bien solo porque yo, el hueso era tan esclerótico medialmente aquí. Simplemente sentí que no lo hacíamos Tener un corte lo suficientemente grueso. ¿Ves lo delgado que es ese corte? Apenas se hundió. Me hace Me pregunto si también necesitamos otro grado de varo. Deberíamos ser capaces de hacer ese. Hmm – Me pregunto si deberíamos hacer esto. Jess Si mueves la base del robot, ¿afectará algo? Yo Piensa que solo – déjame ver antes de hacer algo – Déjame mirar. Solo necesito, necesito más excursiones de esta manera. ¿Puedes empujarlo hacia adentro? ¿Un poco? Sí, eso ayuda. Sí, eso es bueno. Vamos a intentarlo. Sí, está bien. Solo quiero atrapar ese hueso anterior allí. Hay un pequeño labio. Esto es – estamos improvisando un poco aquí Porque este labio no ha sucedido, sino por un ajuste de prensa, no puedo dejar eso así, definitivamente no. ¿Ahora necesito para revalidar, ¿o está bien? Bien. Muy bien, así que vamos a tener esto La cosa se bloquea en allí. Así que estará en el mismo plano de resección. Éste es realmente genial. No, creo que estamos bien. Sí, ahora puedo aclararlo. Vamos a sacar esto. Y si pudieras chupar la espalda allí, Courtney, por un segundo. Sí. Genial. Eso fue realmente genial. No hemos tenido que hacer eso antes, que... que era limpiar ese hueso anterolateral. Veamos ese negro osteotomo de nuevo. Y así, el brazo robótico vuelve a ser perfecto. ubicación para la resección, y ahí está. Roedores. Así que esto es lo anterolateral hueso que fue – eres bueno, Courtney – Eso iba a estar en el camino. Lo siento, es un poco sangriento. Nuestro torniquete no funciona perfectamente. Muy bien, creo que se ve bastante bien. Ahora probaremos la placa base tibial. Sí, el tamaño 3 se ve bien, Así que veamos un esparcidor laminar plano. Ahora estamos Vamos a comprobar y ver cómo lo hicimos. Sí, puedes sacar esa Z. Entonces comprobaremos esta brecha. Vaya, estoy pisando el menisco lateral medial allí. Todavía se ve un poco apretado para un 9. Me alegro de haber tomado esos 2 extras. Bonney. Ahora la brecha de flexión también afloja un poco porque saco el PCL. Lo herí antes, pero nunca lo limpié por completo. Sé que algunas personas dirían que esto es – el brazo robótico es un gran razón para hacer rodillas cruzadas, porque Realmente te permite equilibrar una rodilla muy precisamente, y una de mis principales razones para alejarse de la retención cruzada rodillas ha sido yo Siento mis propias insuficiencias. Pero ese PCL se ve bonito bueno, pero solo tengo... solo han hecho la transición a ser una persona estabilizada posterior, aunque creo que Mantener el El ligamento cruzado aquí habría sido muy razonable. En rodillas que no lo son terriblemente patológico como este, Por lo general, dejo el PCL hasta esta parte, No creo que haga mucho. Afloja un poco la brecha, pero rodillas que son muy patológicas, cuando el LCP pueda ser muy estricto o muy incompetente, Lo sacaré al principio antes de que lo hagamos el equilibrio. Pero no creo que vaya a hacer mucha diferencia en esto. rodilla, así que decidí sacarlo ahora. Y un poco del cuerno anterolateral, o el cuerno posterior en el menisco lateral, y luego un poco de menisco posteromedial. Paso más tiempo que Solía incluso en la parte posterior de la rodilla asegurándome de Todo es agradable y limpio y despejado. Creo mucha infelicidad de Los reemplazos de rodilla provienen de trabajo imperfecto aquí, así que un poco de – obviamente protegiendo el PCL. ¿Tienes el ostetomo curvo Stryker? Sabemos que hay un osteofito posterior aquí, así que voy a ir tras ello con esto. La brecha se ve bastante simétrica. Parece un 9 todavía, así que solo voy a aclarar este osteofito posterior aquí y osteofito medial. Y el agarrador. Así que esa es la mayoría del osteofito posterior. Vamos a sentirnos – bastante bien. Yo Trate de adivinar cuál es el implante El tamaño será para asegurarnos de resecar suficiente y no incide. Un poco más lat – medialmente aquí. Veamos ese osteotomo de nuevo. Aquí vamos. Veamos ese agarrador. Puede necesitar una cureta en ángulo si no puedo obtener esto. Oh no, lo tengo. Allí, ese fue el osteofito posteromedial que vimos en la exploración. Sí, eso Se ve bien. Ahora vamos a voltear hacia otro lado, así que una bonita brecha simétrica. Eso Parece alrededor de 9. Vamos a obtener una medición objetiva en un segundo aquí, pero estoy simplemente limpiando la parte posterior de la rodilla. Tal vez podamos ajustar esto Enciende un poco. Perdonen mi alcance. Ahí vamos, Bonney de nuevo. Así que ahora hay un pequeño remanente del menisco lateral aquí. Siempre siento que el progreso del caso viene a un alto estrepitoso en Esta parte porque realmente tenemos que pasar tiempo y despeje bien la parte posterior de la rodilla. Consigue esto justo sobre el borde tibial lateral. Lo flexionaremos un poco más. Allí Vamos. Vamos a conseguir ese osteotomo ahora, y un mazo. Así que no hay muchas cosas laterales para conseguir Porque ella no tiene mucha patología aquí – Realmente solo tratando de esculpir cualquier cartílago articular residual. Eso es bueno, y veamos ese agarrador. Muy bien, eso debería hacerlo. Déjame sentir. Sí, eso se siente bien y limpio. Bien, tomaremos la inyección ahora.
Nosotros un pequeño cuarto por ciento Marcaine con epinefrina – Poner un poco en la parte posterior de la rodilla – poco centro. No pongo mucho posterolateralmente. Y luego nos aseguramos de Obtenemos un buen subcorte – burbuja subperióstica aquí – Asegurarnos de que realmente lo bajamos la funda MCL muy bien. Eso es bueno. Luego lo comprobaremos lateralmente. Buena burbuja subperióstica allí – luego un poco en la bursa de PESA – un poco arriba en la anterior subcutánea. Bien, ahora descubriremos cómo lo hicimos. Muy bien, Courtney, si no te importa dar un paso a tu derecha.
CAPÍTULO 12
No, podemos dejarlo, tal vez en un segundo. Déjame probarlo. Así que veamos un 9 en el 3 CR. Vamos a probar la retención cruzada implantes porque si necesito hacer un ajuste No estoy comprometido con nada, y luego el fémur 3 CR tal vez un 11. Veremos qué pasa aquí. Muy bien. Muy bien, ahora veremos cómo nos fue con nuestro equilibrio si Ser castigado tomando ese milímetro extra. No, creo que va a ser bueno. Así que vamos a deslizar eso, así que ahora vamos a ver lo que tenemos. Así que todavía tienen un poco de contractura de flexión, lo que pensamos que podría ser una preocupación, Y en flexión, nuestras brechas se ven muy bien – 19, 19 – así – y hay Sin inestabilidad. En todo caso, estamos un poco apretados en ambas direcciones, Jess. No estoy seguro de que – clínicamente, No me parece una contractura de flexión. No sé. Ese– Yo diría que es una contractura de flexión, así que creo que Ella es bastante heterosexual a pesar de que esa cosa está diciendo 6. Dije que nunca aceptaría eso, Pero veamos. Es una rodilla muy firme y rígida, ¿sabes? Si nos quitamos uno más la tibia, nos aflojará globalmente, lo que creo que puede no ser una mala idea. El torniquete todavía está arriba, así que eso será, eso, eso es. Mi seguimiento rotuliano no es perfecto debido al quad. No, porque creo que el La rótula va a seguir bien. Es solo una cuestión de: una llamada de juicio ahora si creo que esto está hecho, O necesitamos otro milímetro de la tibia. El MCL se siente bien. El equilibrio general tiene muy poca laxitud varo y valgo en todo todo el asunto. Yo diría que es un poco en el lado apretado. Vamos Haz uno más de la tibia, y – y luego eso solo tomará un segundo. Déjame ver el mango para tirar del fémur. Así que vamos a hacer un ajuste a: creo que la rodilla está un poco apretada todo el camino, y así vamos a... vamos a tomar otro milímetro, ¿Qué nos pone a qué? 8.5 lateral? Oh, ¿ya lo hiciste? Bien. Sí, tenedor de pepinillos. Sí. Seguiría adelante y lo dejaría. Está bien. No estoy convencido de que eso sea lo que se necesitó. Muy bien, doblado. Solo tener mucho cuidado aquí para agregar un poco de un ... hueco. Creo que eso va a estar bien, y una Z. Está bien, creo que eres buena, Courtney. Muy bien, traeremos esto de vuelta. Veamos nuestra sonda verde por última vez. Así que eso es bueno, y revisaremos la hoja de sierra. Así que, literalmente, estamos haciendo un corrección de 1 milímetro aquí, lo cual es algo inusual. No he recortado mucho. Aquí vamos. Eso, tal vez no estaba en el agujero. Ahí está. Bien. Muy bien. Déjame ver el Schnidt. Sí. Muy bien, así que una resección más. Esto, irónicamente, es el verdadero poder de la hoja de sierra en que puede hacer esto. Muy bien, haremos el medial lado primero, Porque ahí es donde el hueso es realmente duro. Mucho mejor: ahora estamos debajo del hueso subcondral. Me gusta mucho ese corte mejor en realidad. Me alegro de haberlo hecho. Muy bien, perdón por el lío. Bien. Sí, gracias Courtney. Absorbe todo eso. Este es un pequeño labio por adelantado. Sí, Rongeur. Solo pon una mano allí para mí, Y luego lo probaremos de nuevo y veremos dónde estamos. Sí, en realidad todo está bien. Todo eso está bien. Bien, vamos a probar eso de nuevo. Vamos a sacarlos y ver. Ese corte se ve mejor. Fue justo a través de ese subcondral. Tal vez allí era un poco de médula ósea o algo así Eso lo estaba haciendo apretado. Está bien, y el fémur. Muy bien, mazo. Muy bien, eso es bastante bueno. Sí, eso se siente mejor. Sí. Todo sobre eso es mejor. Mira, ahora tenemos nuestro Flexión hasta 3° solamente, lo cual es mucho mejor. La alineación mecánica es de 2° y Años 20, lo cual está bien, y ahora hay un poco de jugar, que también es mucho mejor. La rótula no me preocupa porque El torniquete todavía está arriba. Sí, todo sobre eso es mejor. Ese 1 mm de diferencia hace Es una rodilla mucho más feliz. Así que marcaremos nuestra rotación femoral: rotación tibial, quiero decir, relativa a el fémur. Bien, y flexionaremos esto. Está bien, puedes desinflar el torniquete ahora. Y somos buenos con el robot. Voy a tomar el taladro de orejeta femoral a continuación, por favor. Así que ahora eso es todo para la parte robótica del caso. Hemos aceptado todo. Ahora solo tengo que terminar la preparación ósea para colocar los implantes. Asegurémonos de que todas las posiciones se vean muy bien, Así que perforaremos los orificios. Bien, removedor de fémur, el mango negro, y el mango tibial. Así que ahora tengo que quitar las matrices porque estos pines están en el camino. Puede que necesite un Schnidt. Estos pines están en el camino de la placa base tibial, Así que vamos a sacar eso. Tomaré el rongeur. Sí. Siga empujando hacia el paciente. Perfecto: agarra el otro. Aquí viene el punto de control femoral. Tenemos que conseguir todo Estas pequeñas cosas afiladas de aquí. Punto de control tibial – todo bien. Ahí está. Sí, tira de esos dos Chicos. Deja caer un poco la mano. Aquí tienes. Perfecto – uno más. Luego tomaremos la cola de ballena. Entiendo. Perfecto. Bien, así que ahora ... Bien. Veamos el corte – cortador de cajas. Así que este es un problema estándar ahora. Volvemos a Hacer la resección para el corte de la caja y un alfiler en el Adaptador de llamada. Perfecto. Luego usaremos un alfiler de cabeza larga. Courtney lo tiene. Justo ahí. Tomaremos – eso está bien, y tomaremos la sierra de recip. Gracias. Sé que es triste sacar todo este buen hueso de aquí. Muy bien, creo que se ve bastante bien. Aquí tienes. Probaremos el PS, gracias. Nos aseguraremos de que esto se ajuste a la forma que nos gusta. Eso me parece bastante bien. Hay un poco de tejido blando atrapado, pero eso estará bien. Tomaremos una esponja de vuelta. Horquilla de pepinillos. Genial. Lo estás haciendo muy bien Ally, gracias.
CAPÍTULO 13
A continuación, golpearemos la tibia con las cosas de ajuste a presión. Muy bien, Courtney, ¿entiendes eso? Sí. Voy a cambiar la protuberancia hacia el frente. Creo que fue una buena decisión tomar ese milímetro extra. Ella era solo un poco apretado. Antebrazo y una mano – Bien. Voy a mover esta luz. Bien, bien. Ahora tomaremos un Schnidt con la placa base tibial número 3, y luego dos alfileres de cabeza pequeña. Entonces, marqué la rotación cuando el La rodilla estaba en extensión. Asegúrese de que esto sea agradable y plano, porque fue un recorte. Oh, hay tejido blando, por eso. Sí. Aquí vamos. Sí, solo el de 1 a 3. De acuerdo, pequeño alfiler con cabeza, así que puse la rotación en posición. Otro de estos: Esa es la parte más difícil del caso: entregar eso. Muy bien, eso se ve bastante bien, en realidad. Puede abrir la placa base tibial de tamaño 3, por favor. Eso se ve bien. Ahora tomaremos el golpe de la torre. Sí, y el pequeño golpe, el de ajuste a la prensa. Eso es correcto.\N3? Correcto. Así que esto solo crea la quilla. Su calidad ósea es buena, así que creo que el ajuste a presión es una buena opción. para ella. Perdón por el lío. Eso se ve bien. Y luego sacaremos a este tipo. Quizás. Aquí están tus dos pequeños alfileres hacia atrás, y luego esta cosa crea el espacio para los cuatro pequeños orificios. Tengo que asegurarme Es agradable y sonrojado. Eso se ve bien. Y luego un pequeño taladro afilado Se prepara para las asas. Uno, dos, tres Cuatro. Bien. Tomaré un Kocher o un Schnidt, tal vez un Schnidt está bien. Bueno, y luego la placa base tibial real. Entonces, ya que es press-fit, No tenemos que hacer ninguna cementación. Solo tengo para asegurarse de que todo esté limpio. Bien. Usaremos esta pequeña esponja de regazo aquí. Muy bien, veamos. Así que esta es la verdadera placa base. Tiene un titanio, es un titanio placa base con un Revestimiento poroso y cuatro pequeñas espigas aquí. Así que el truco A esto tiene que ir directamente hacia abajo. Ella tiene ese poco quiste, ¿eh? Lo siento, acabo de ver un pequeño quiste aquí. Oh sí, no es nada. Está bien. Simplemente estableceremos eso cuidadosamente allí. Dale un pequeño tirón. Está bien, mazo, por favor. Así que– Así que vamos a empezar esto, Y luego nos aseguraremos de que no haya tejido blando en ninguna parte. Eso se ve bien. Eso se ve bien. Necesito adelantar un poco mi mano. Se ve bastante bien. Muy bien, ahora solo haremos una verificación y nos aseguraremos de que no haya tejido blando en cualquier lugar. Eso se ve bien. Creo que estamos justo en el borde lateral allí. De acuerdo, doble banger. Veamos que Smith Peterson. Solo tengo un poco de, en realidad, creo que es tejido blando. Sí, todo es principalmente tejido blando allí – Asegúrese de que no haya escombros. Eso se ve bien. Compruebe el lado lateral. Sí Estamos justo al límite. Está bien, arriba y más.
Bien, puedes abrir el PS del fémur izquierdo 3 press-fit. Adelante, Courtney. Tomaremos la prueba CR de 9 mm. El torniquete está abajo, así que ahora siempre está un poco sangriento. Tomaremos la prueba de CR, por favor: 9 por 3. El de CR, por favor. Lo haremos a continuación, en un segundo. Allí, y luego el fémur. Por lo tanto, este es también un componente recubierto de ajuste a presión que tiene perlas e hidroxiapatita. Muy bien, mazo, por favor. Mismo– Solo tenemos que asegurarnos de que nada esté atascado y que esté recto, Porque a veces estos pueden ser un poco apretados. Hasta ahora, bien. Sí, se ve bastante parejo. Bien. Solo lo comprueba. Veamos la doble pancarta. Mi lado tiene que irse un milímetro menos. Está bien, sí, solo necesita inclinarse un poco hacia mí. Lo tengo ahora. Bueno – buen ajuste seguro. Entonces, sí, solo verificaremos con el CR una vez más. Se ve bien. Torniquete abajo, Así que la rótula está siguiendo perfectamente de nuevo ahora. Para Se ve muy bien.
Ahora solo haremos una última verificación posterior, y comprobaremos el polietileno real para asegurarnos de La mecánica no cambia a pesar de que No creo que lo hagan. Y solo revisaremos lateralmente. ¿Realmente tienes que Hohmann directo? Gracias, miremos hacia atrás – Asegúrate de que no haya osteofitos ni nada gracioso allí. ¿Tienes un pequeño chorro de bombilla? Pozo ¿cualquier cosa? No, eso es tejido blando. No hay cemento, entonces. Eso se ve bien. Vamos a comprobar medialmente. Chupa ahí Courtney, sí. Sí, el osteofito está bien. No está sobre-colgando. Y luego comprobaremos lateralmente: los controles sistemáticos. Vaya, hay algo allí: Smith Peterson. Siempre hay un poco de osteofito lateral. El resto de todo eso parece claro, y luego verificaremos medialmente con un Schnidt. Entiendo. Todo eso se ve bastante bien. Y veamos este. Este es el verdadero ensayo de PS de polietileno. Vamos a ponerlo en marcha. Bonito – tengo un poco de tejido blando atrapado aquí. Bueno, tan bonita rodilla recta – no hiperextendida, sin contractura de flexión, estable como puede ser, Realmente no hay laxitud varus / valgus, pero es mejor de lo que era. Tiene un Un poco de conmutación, lo cual es bueno. Las pistas de rótula perfectamente. La flexión a la gravedad es toneladas – 125 probablemente, y puedo sobre-empujar 140 probablemente – pero ella no lo conseguirá ese. Probablemente se moverá allí. Qué bien. Tomaremos el 9 CV por un 3 – X 3 – gracias. Lo tomaremos. Bien, muy bien. Tomaremos el poli real ahora. Aquí está el polietileno real. La parte posterior se estabiliza – Sin tejidos blandos. Allí, eso es bueno, y un Schnidt. Siempre hay una pequeña almohadilla gorda que quiere quedarse atrapada aquí. Eso es bastante bueno. Lo presentaré. Asegúrate de que no haya nada allí, eso es bueno. Sí, eso es bueno. ¿Entendiste eso así, Courtney? Muy bien, le daremos un pequeño toque de amor. Sí, intenta mantenerte en el poli. ¡Eso es todo! Está bien. Creo que salí muy bien. ¿Qué es eso? Bien, ¿tenemos algo limpio y limpio para poner aquí?
CAPÍTULO 14
¿Tienes una vuelta limpia? Gracias. Muy bien, dos Kocher – y la pluma. Establecí la tensión del mecanismo extensor aquí. Es por eso que el movimiento de asistencia es el de Kocher. Póngalo justo al lado, perfecto. Llevaré un Vicryl número 1. Pondremos una puntada en la almohadilla de grasa. Pensé que esta rodilla podría ser como slam dunk para equilibrar, y me alegro tuvo que hacer un par de ajustes\Npara que podamos mostrar cómo lo hacemos. Ejecuto una capa 0 en el tejido adiposo proximal aquí. Tomamos dos buenas decisiones, que fue Mover la base robótica para obtener el ángulo porque la parte lateral era dura, y luego el 1 mm. Es increíble la diferencia, pero pasó de Contractura de flexión de 6 grados a 3.\N3, sí – Para eso 1 mm. Creo que ese hueso esclerótico puede haber desviado un poco la sierra. Quizás. Y luego, cuando pasamos por debajo, fue, en realidad tomó más de un milímetro de hueso relativo porque ese hueso esclerótico ... \NIs sobró, sí. Muy bien chicos, gracias.
CAPÍTULO 15
La cirugía está completa. Creo que todo salió muy suavemente. Tuvimos que hacer algunos ajustes, como ya había hablado. sobre antes relacionado con los implantes. Tú– en realidad, me complace que algunos de Eso sucedió porque la mayoría de los casos No necesito hacer ningún tipo de recortes o cambios de posición robóticos, pero sentí la rodilla con algo apretada con las brechas relativas a donde las brechas estaban siendo predichos por El brazo robótico – así que decidí resecar la tibia un poco más. Creo que hay era un hueso esclerótico muy grueso medialmente, y por lo que puede haber desviado el hoja de sierra un poco, y eso hizo que La brecha un poco más estrecha de lo planeado. Pero una vez que se hizo la resección, Sentí que la rodilla se equilibraba muy bien. El eje mecánico se reconstituyó adecuadamente a 2 grados, que es lo que habíamos planeado. La rótula estaba siguiendo muy bien, y todo el implante La fijación fue excelente. Puedes ver cómo se hicieron los ajustes, y La gran curva de aprendizaje para mí con estos Cirugías robóticas ha sido en gran medida conociendo Cómo ajustar y equilibrar una rodilla con la capacidad que no hemos hecho antes. Hubo algunos muy rápidos establecer los ajustes que hice para rotar externamente el fémur y llevarlo un poco anterior, lo que aflojó nuestro espacio en uno dirección y apretó en otra. Y luego acepté un poco de desequilibrio en la esquina posterolateral, que es una laxitud biomecánica normal para un paciente que no tiene mucho cambio degenerativo posterolateralmente, y resultó que en realidad se equilibró muy bien una vez que los implantes reales estaban en su lugar. Creo que el medial Liberación a medida que se realizó la cirugía Liberó el PO – El espacio articular medialmente suficiente para crear un espacio simétrico. Y en general el arco y la estabilidad fueron excelentes, así que creo que la cirugía salió bien. Creo que el momento general es muy similar a la cantidad de cirugía. Eso fue aproximadamente un tiempo de torniquete de una hora incluso con los dos ajustes, aunque lo haga Desinflar el torniquete antes de colocar los implantes para Implantes de ajuste a presión. Creo que en general todo fue muy bien. Puede ver el potencial de Esta tecnología a medida que mejoramos en la comprensión Cómo equilibrar estas brechas y usar El poder de la tecnología para hacer ajustes muy ajustados Antes y después de la cirugía – realmente creo que tiene el potencial de traer valores atípicos, mejorar la mecánica en términos de un enfoque cinemático, Comprender y apreciar lo mecánico Algunos aspectos de ella pueden unir esas dos cosas. con esta tecnología de una manera que nunca antes habíamos podido hacer a mano alzada.